Controlar 4-Bot con el Nunchuk
Seguimos publicando las sesiones del robot cuadrúpedo 4-Bot a buen ritmo. En esta ocasión vamos a ver cómo conectarle el Nunchuk de la Wii para controlar los movimientos que programamos
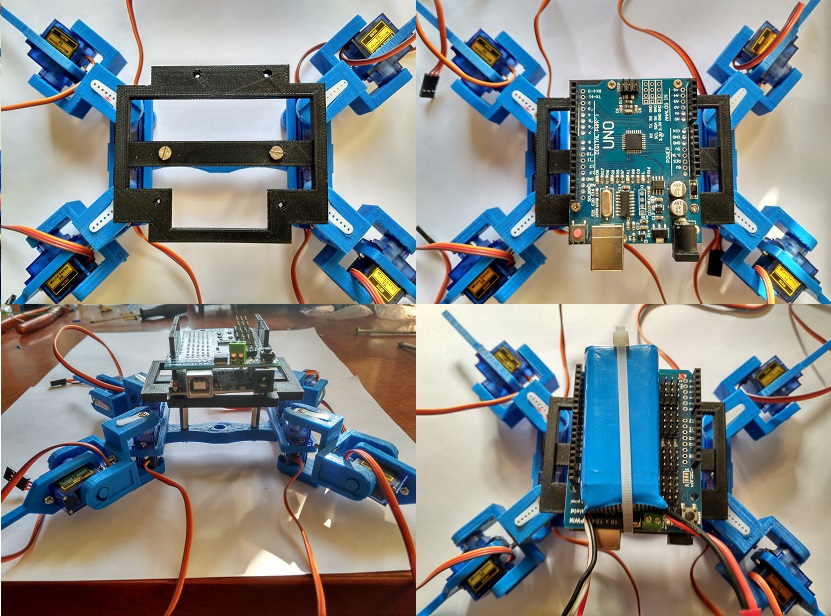
Programando los movimientos del 4-Bot
La semana pasada vimos cómo montar el robot cuadrúpedo 4-Bot, y como evidentemente no podíamos dejarlo ahí, hoy vamos a ver cómo conectar todos los componentes y programar sus movimientos. Antes
Robot cuadrúpedo: introducción y montaje
Inauguramos un nuevo área de trabajo en la página en la que usaremos robots impresos en 3d. Ya os habíamos comentado en otras ocasiones que teníamos muchísimas ganas de empezar con

Lector de huellas dactilares para Arduino
Después de una temporada (más larga de lo que nos habría gustado) sin publicar nuevas sesiones, volvemos a la carga aprovechando que la mayoría de nosotros estamos ya aterrizando de