Robot cuadrúpedo: introducción y montaje
Inauguramos un nuevo área de trabajo en la página en la que usaremos robots impresos en 3d. Ya os habíamos comentado en otras ocasiones que teníamos muchísimas ganas de empezar con ello, porque nos ofrece un nuevo mundo de posibilidades en el que la imaginación nos puede llevar a realizar proyectos de lo más originales y con un nivel de personalización que hasta ahora no podíamos tener.
Además, a quien le interese, podrá iniciarse también en el diseño de piezas en 3D, ya sea para realizar sus propios proyectos desde cero o para aprovechar proyectos ya existentes para modificarlos a su gusto, como hemos hecho en el caso del cuadrúpedo.
El diseño original lo hemos sacado de Thingiverse, una página que si no conocéis, estáis tardando en entrar a echar un ojo. En ella podemos encontrar miles de diseños para imprimir con nuestras impresoras 3D, y muchos de ellos en forma de robots o cualquier tipo de construcción creados para integrar Arduinos o Raspberrys.
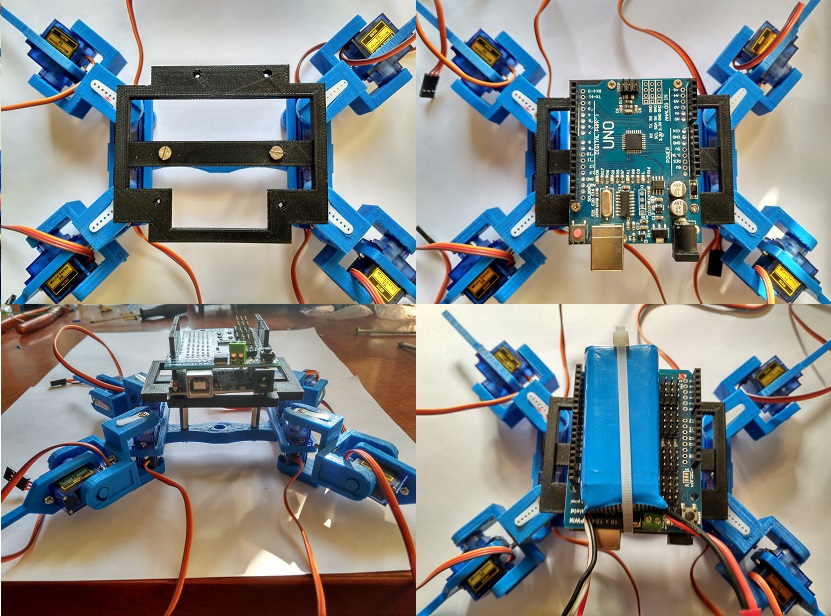
Como habréis deducido por el título, hemos decidido empezar con un robot cuadrúpedo, o sea, de cuatro patas. Utilizaremos dos servos para mover cada una de ellas con lo que equivaldría más o menos a un hombro, lo que nos dará la posibilidad de crear movimientos bastante interesantes. Aunque la verdad es que nos hemos quedado con las ganas de construir uno de 6 patas y 3 servos en cada una dellas, pero eso de momento lo dejaremos para más adelante.
En esta primera sesión vamos a realizar una pequeña introducción para después pasar a enumerar los materiales necesarios para llevar a cabo el proyecto y terminaremos con las instrucciones de montaje del robot.
Esto nos dejará en posición de ponernos a programar. En la siguiente sesión programaremos los movimientos principales del robot, y a partir de ahí modificaremos a programación para construir uno u otro tipo de control. Ya iremos viéndolos, aunque a nosotros el que más nos ha gustado es controlarlo desde el Nunchuk de la Wii, que además de un joystick y dos botones integra un acelerómetro que nos permite usar el movimiento de la mano para controlar el cuadrúpedo.
Y con esto nos despedimos de momento. Un saludo desde Prometec y hasta la próxima.
