Programando los movimientos del 4-Bot
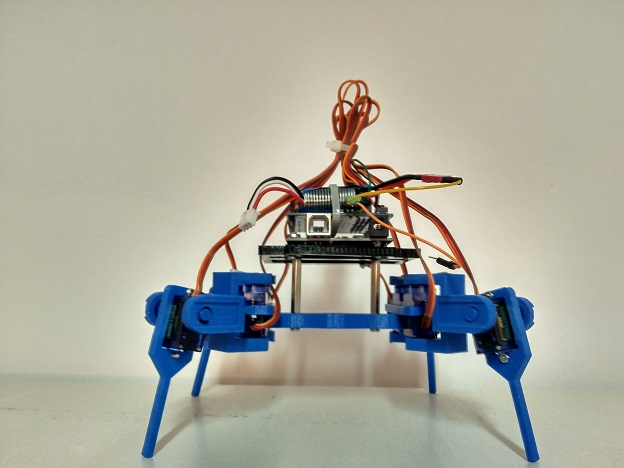
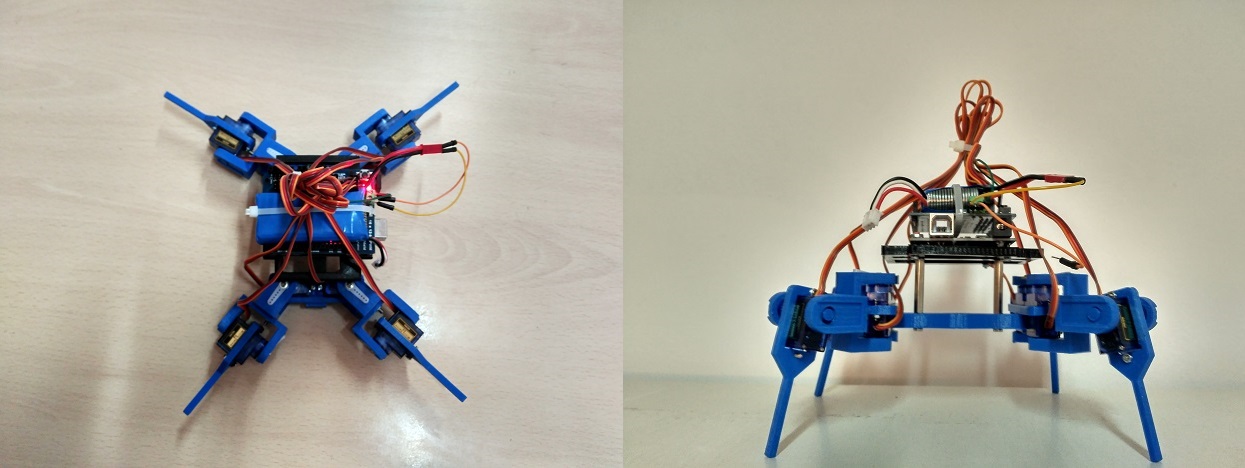
La semana pasada vimos cómo montar el robot cuadrúpedo 4-Bot, y como evidentemente no podíamos dejarlo ahí, hoy vamos a ver cómo conectar todos los componentes y programar sus movimientos.
Antes de empezar a programar tenemos que tener una especie de esquema mental con el que seamos capaces de visualizar cómo tendría que mover las extremidades el robot para realizar el movimiento que estamos buscando.
Veréis que la sesión es un poco más larga de lo que estamos habituados, ya que el programa es muy largo. Pero no os preocupéis, esto no significa que sea difícil, ya que sólo utilizamos una única instrucción durante prácticamente todo el programa. Simplemente es porque para conseguir cada uno de los movimientos necesitamos mover los 8 servos del 4-bot, y dependiendo del movimiento, tendremos que mover algunos varias veces.
Aquí tenéis el enlace a la sesión:
Y, por supuesto, no dudéis en mejorar o crear nuevos movimientos, seguro que conseguís sorprendernos. A partir de ahora utilizaremos estos movimientos que hemos programado para hacer diferentes tipos de control del robot, tanto controlado a distancia como autónomo.
Esto es todo por ahora. Un saludo desde Prometec y hasta la próxima.
