Controlar 4-Bot con el Nunchuk
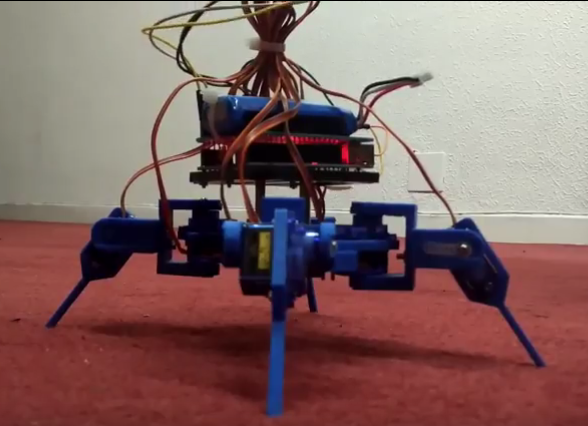
Seguimos publicando las sesiones del robot cuadrúpedo 4-Bot a buen ritmo. En esta ocasión vamos a ver cómo conectarle el Nunchuk de la Wii para controlar los movimientos que programamos en la sesión anterior, o los que vosotros mismos hayáis creado.
Ya lo hemos comentado más veces, pero nos gusta mucho este mando porque nos permite utilizar el acelerómetro que integra y que en este caso utilizaremos para que el robot se incline en la misma dirección que lo haga nuestra mano. Además los botones y el joystick nos permitirán hacerle andar en cualquier dirección y que ejecute las acciones de tumbarse y saludar.
No vamos a entrar demasiado en detalle porque ya dedicamos una sesión completa al Nunchuk, pero veremos lo necesario para integrarlo en nuestro robot.

Aquí os dejamos el enlace a la nueva sesión:
La verdad es que nos lo hemos pasado pipa jugando con 4-Bot, e incluso nos ha sorprendido lo bien y lo rápido que responde a nuestras ordenes. Esperamos que lo paséis igual de bien.
Un saludo desde Prometec y hasta la próxima.
