Unas pocas palabras antes de empezar
¿Por qué Cleanflight si hasta ahora hemos hablado casi sólo de Betaflight?
Porque el FC de Dumbo ya viene con el firmware Cleanflight preinstalado, y aplicando la ley del mínimo esfuerzo, nos vamos a ahorrar el trabajo de flashear Betaflight. Por otro lado Cleanflight y Betaflight son muy parecidos, podríamos decir que son primos hermanos. Si ésta es tu primera configuración de un FC, nada de lo que veas luego en Betaflight te va a sorprender demasiado. En cualquier caso, siempre puedes flashear Betaflight en este mismo FC si te sientes más cómodo. Nosotros en este tutorial vamos a ir a lo fácil.
Hay que montar el dron completamente para configurar el software de vuelo?
No. No es necesario montar el dron completamente para configurar el FC, sin embargo, hay algunas tareas que sí exigen que distintas partes del dron esten montadas, así, para configurar la radio completamente, el RX (y es posible que la batería también) debe estar conectado; para configurar los motores y ESCs correctamente también es necesario que los ESCs y la batería estén conectados, y para configurar bien el OSD (si el FC dispusiese de él), es conveniente que el sistema FPV y la batería estén conectados, y así lo mismo se puede decir para los LEDs, el GPS y los otros periféricos.
En este tutorial, el trabajo por simplicidad se hará con el FC desconectado, pero intentaremos explicarlo todo, así que si tu FC está ya soldado no hace falta que sueltes nada, y si no has conectado nada todavía, tampoco hace falta que te pongas a soldarlo todo a todo correr.
Este es uno de tres tutoriales que tenemos sobre este dron. Es probable que también quieras ver como es el esquema eléctrico y cómo ensamblar el hardware de este dron.
Configurando a Dumbo en CLEANFLIGHT
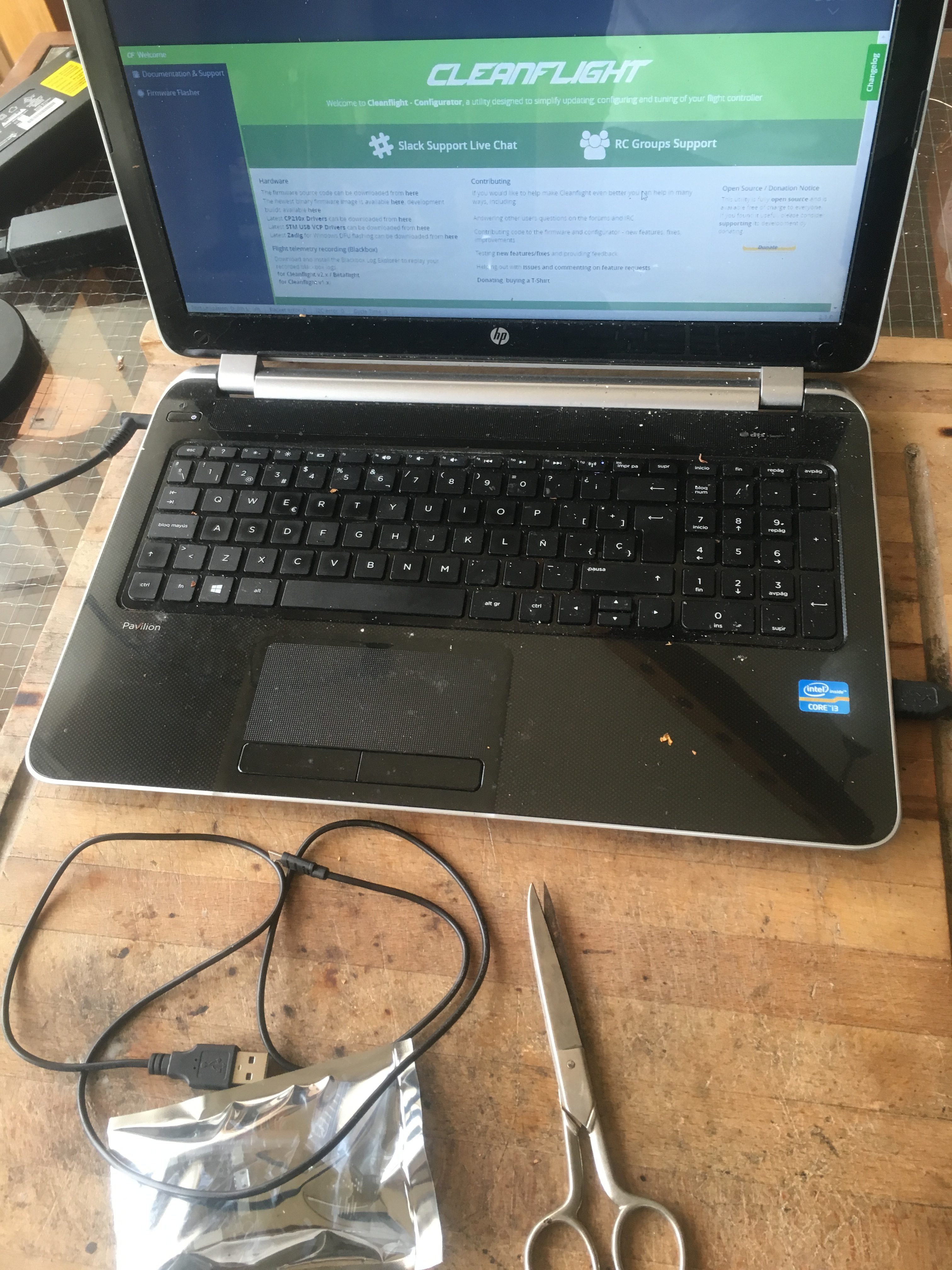
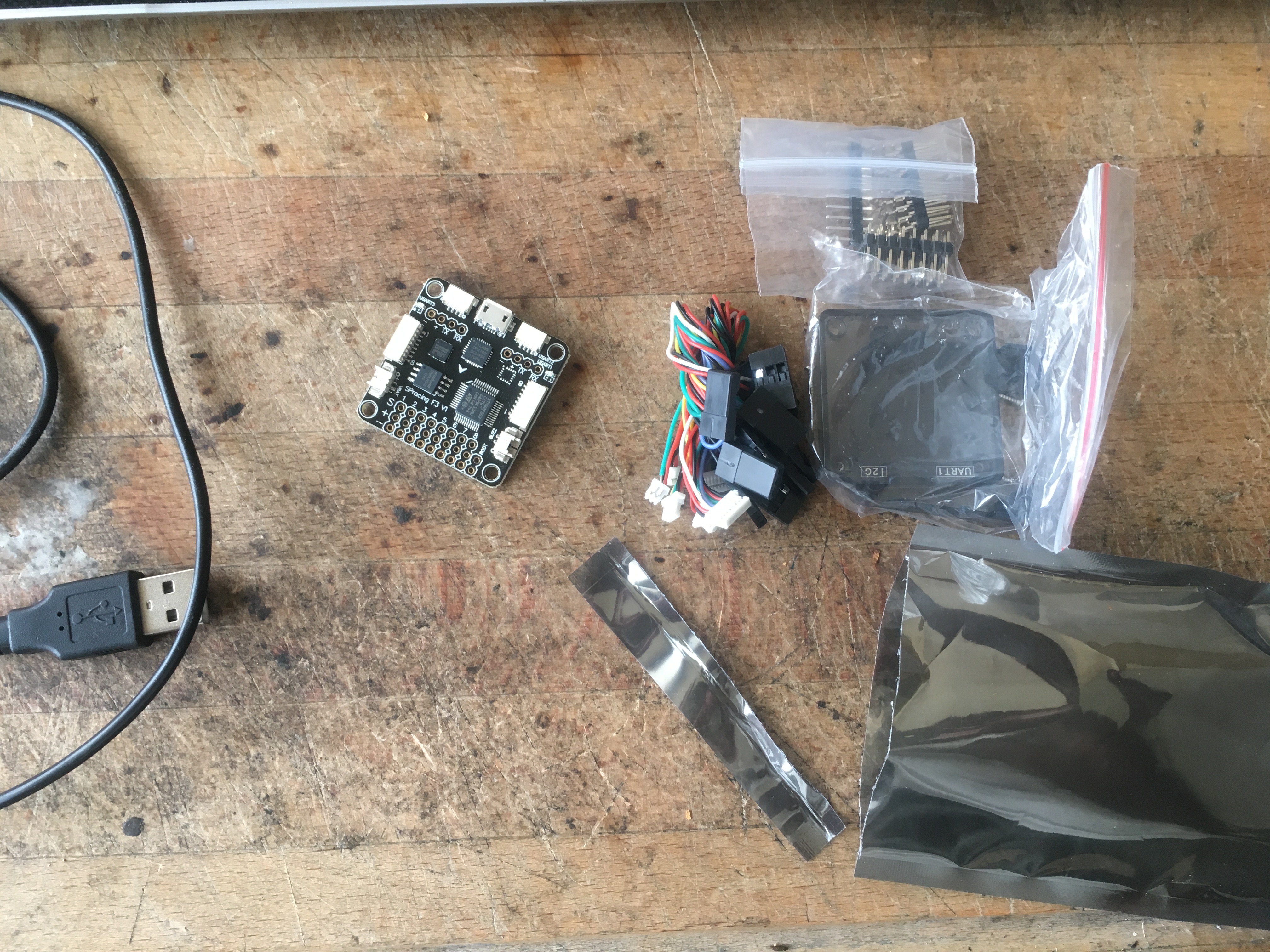
Comenzamos este tutorial tal como lo vas a hacer tú. Con un FC completamente nuevo al que no le hemos hecho nada todavía. Para llevar a cabo este tutorial necesitarás: el FC, unas tijeras para cortar el paquete donde se encuentra el FC, un cable mini USB y un ordenador con Google Chrome instalado y conexión a internet.
Si el FC viene en una bolsa con cierre ZipLock no necesitas las tijeras.
Lo primero que vas a hacer es descargarte e instalar un par de aplicaciónes gratuitas de Chrome y los drivers que son imprescindibles para hacer la configuración del software de vuelo.
[one-half]La primera aplicación es CLEANFLIGHT. En la página de portada del mismo tienes enlaces para los drivers que son necesarios para correr la aplicación: CP210X, STM USB VCP, y Zadig.[/one-half]
[one-half]El segundo es BlHeliConfigurator. Afortunadamente, no te hace falta cargar más drivers para esta aplicación.[/one-half]
[one-half]Esta es la pantalla con la que nos recibe CLEANFLIGHT. Abajo a la izquierda tienes los enlaces para los drivers
[one-half]Conectamos el FC al ordenador con el cable USB. El portatil emite un sonido confirmando que hemos habilitado un puerto de comunicaciones. En la esquina superior derecha de la pantalla puedes ver como el número del puerto COM ha cambiado. Dos LEDs se encienden en el FC. Hacemos click en el botón verde «Connect» en la esquina superior derecha de la pantalla para abrir el puerto de comunicaciones.[/one-half]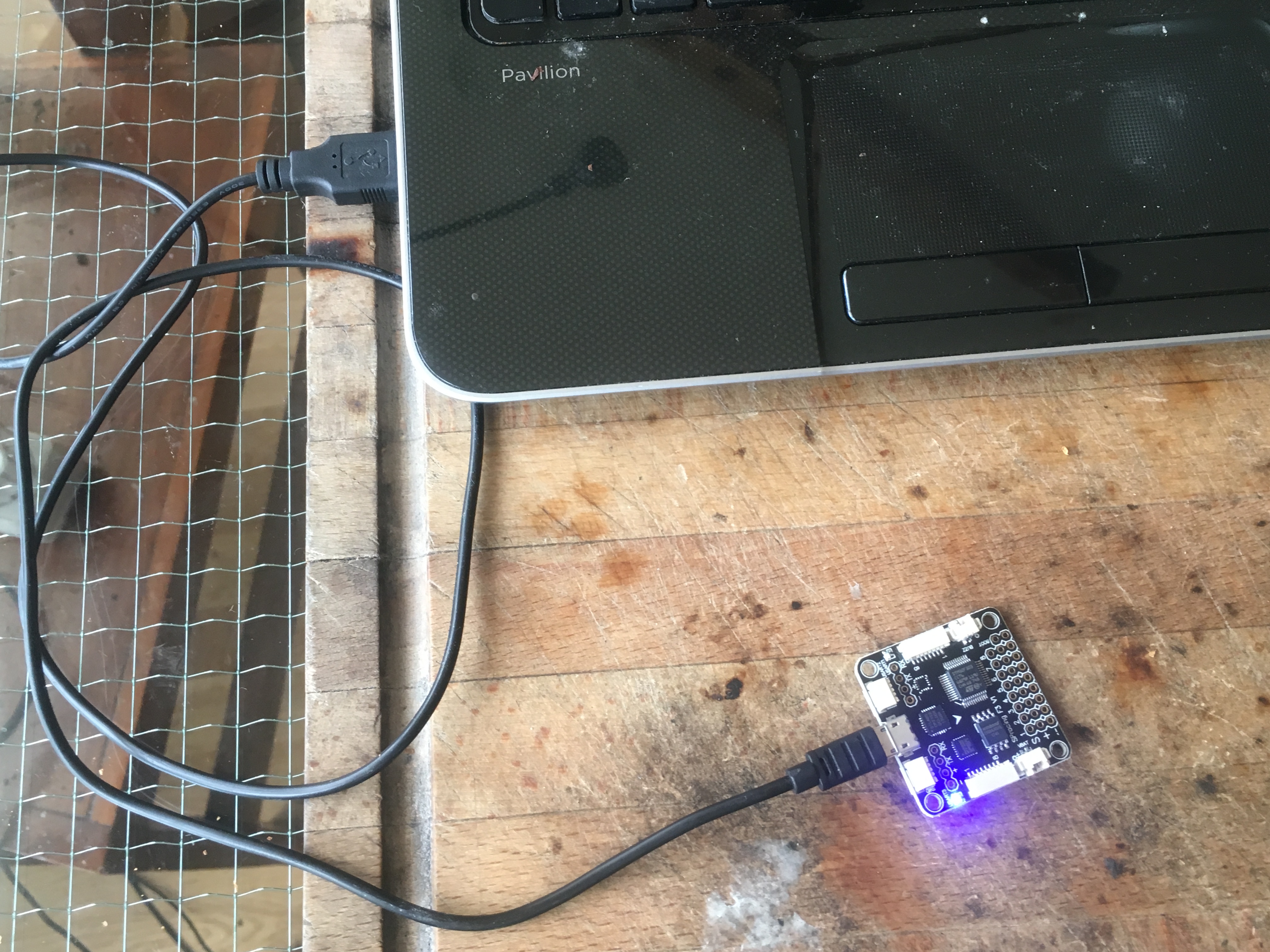
Pestaña Setup
No haremos nada aquí. Con el dron ya completamente montado, podemos definir el plano horizontal con el botón «Calibrate accelerometer«. Esto sólo es necesario para los modos de vuelo autonivelados[/one-half]
Pestaña Ports
Habilitamos el puerto serial para el RX en el UART3.
Es imprescindible en este punto darle al botón de «Save and Reboot» o los cambios no se guardarán[/one-half]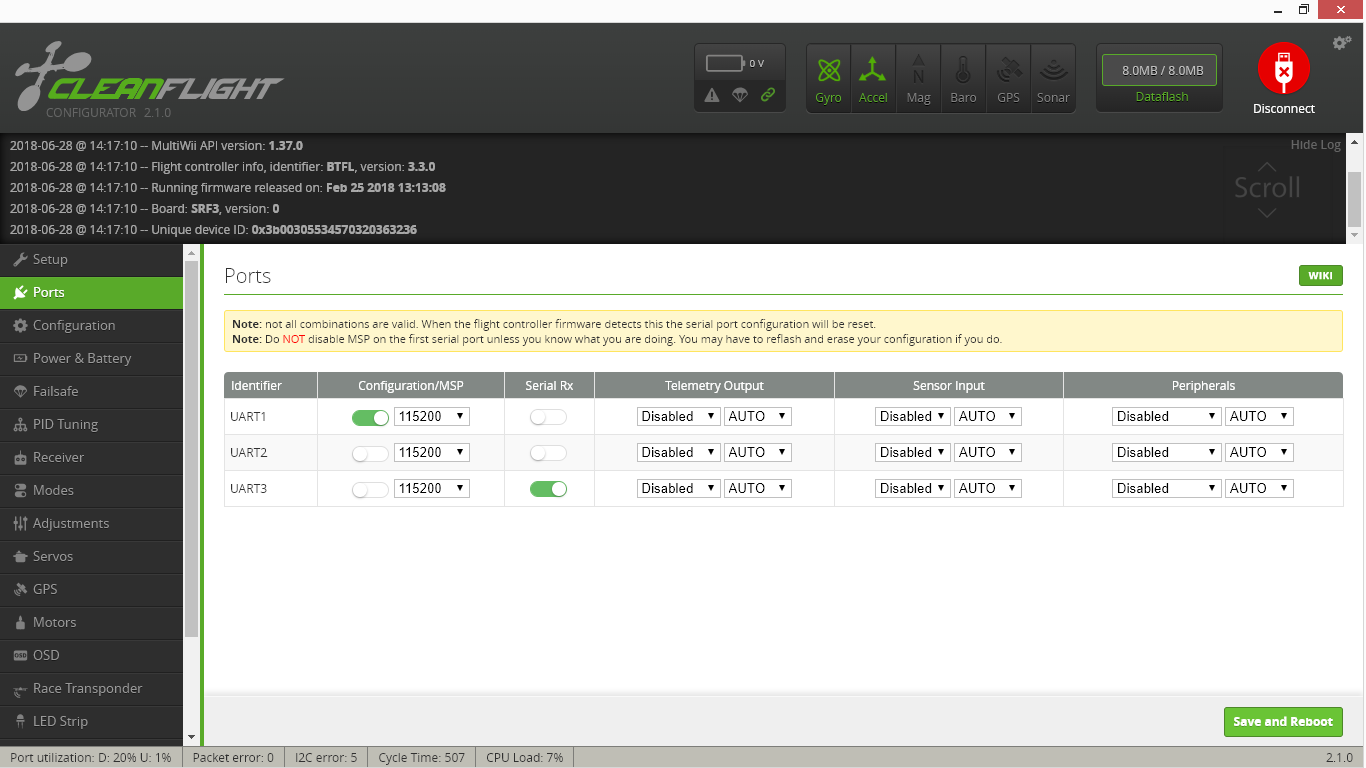
Pestaña Configuration (1)
Todo bien en esta primera parte. El protocolo de comunicaciones para los ESCs es correcto.
Toma nota del número del valor de la entrada para el Acelerador mínimo – Minimum Throttle (1070) Volveremos a él cuando configuremos la radio[/one-half]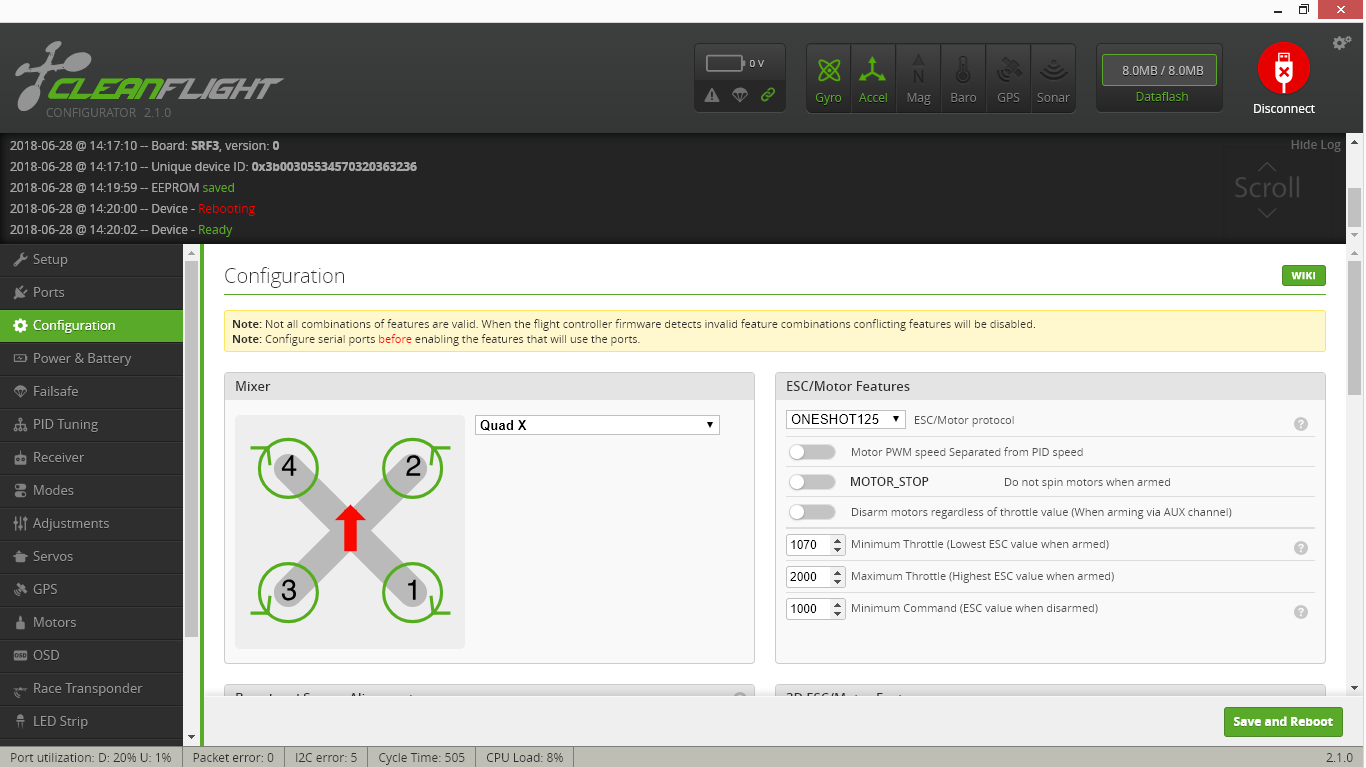
Pestaña Configuration (2)
Si ya has montado el FC en el chasis, aquí puedes orientarlo correctamente con «Board and Sensor Alignment«. El FC tiene una flecha blanca impresa en su cara superior que indica la parte delantera del dron. Ésta es su orientación por defecto. Con «Board and Sensor Alignment» esto puede ser cambiado[/one-half]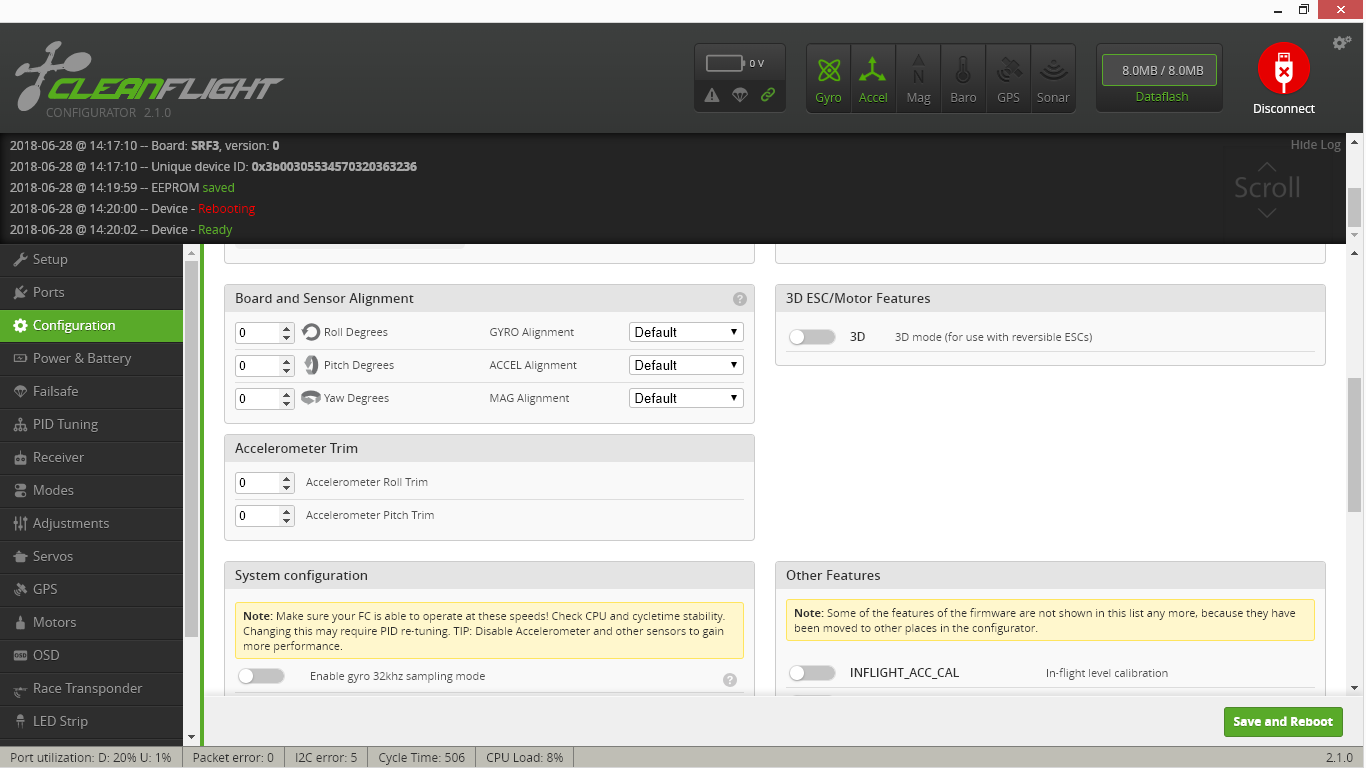
Pestaña Configuration (3)
El acelerómetro debe estar activado para los vuelos autonivelados. El FC no tiene barómetro ni magnetómetro, así que es mejor desactivarlos para no cargar el procesador inutilmente.
No aumentes demasiado la velocidad de ciclo. Se trata de un FC con un F3.
Aquí también puedes cambiar el nombre de tu máquina.
En la derecha de la pantalla deja activados nada más telemetry y airmode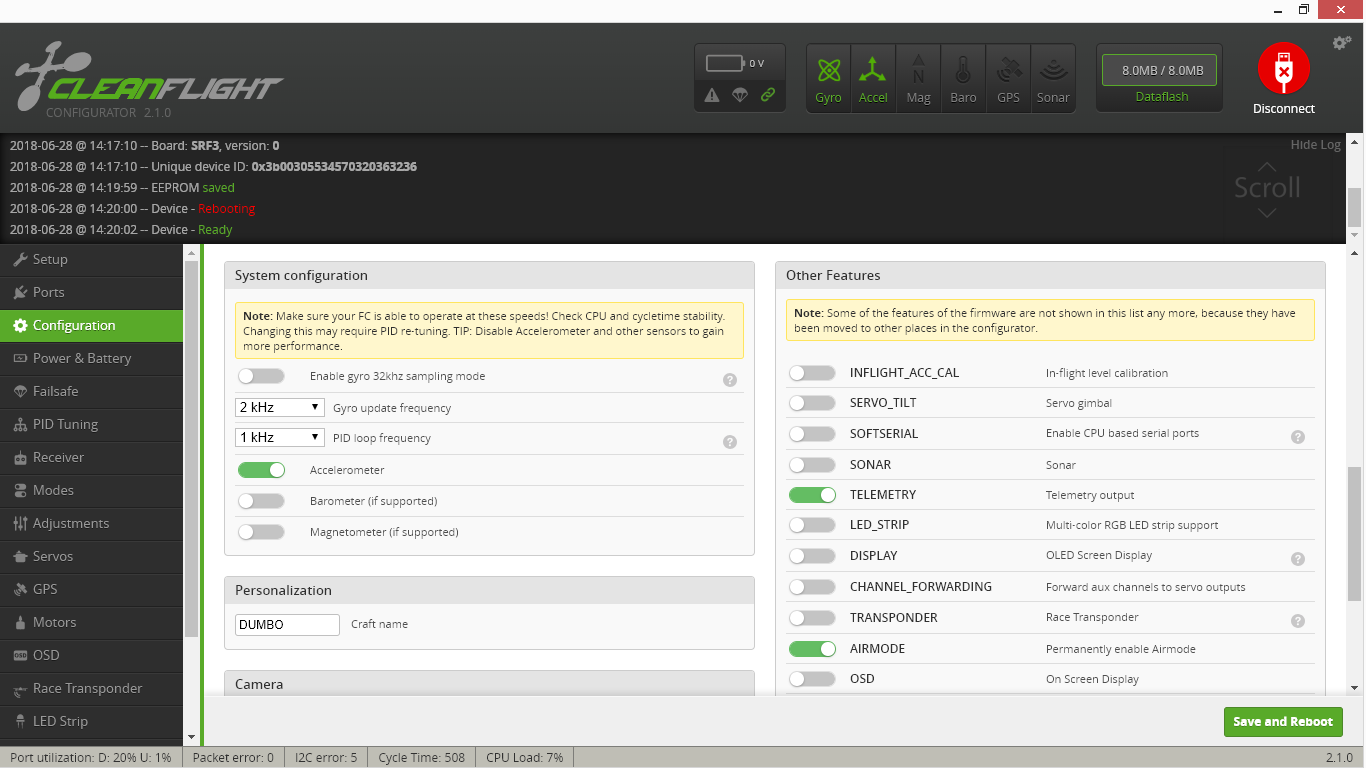
Pestaña Configuration (4)
Configura la comunicación con el receptor de radio a una entrada serial (Serial Based Receiver).
En cuanto al «provider», depende de cual es tu transmisor de radio. Si se trata de un FlySky será IBUS, si se trata de un Taranis será SBUS, etc.
Antes de salir dale a «Save and Reboot» o los cambios no se guardarán[/one-half]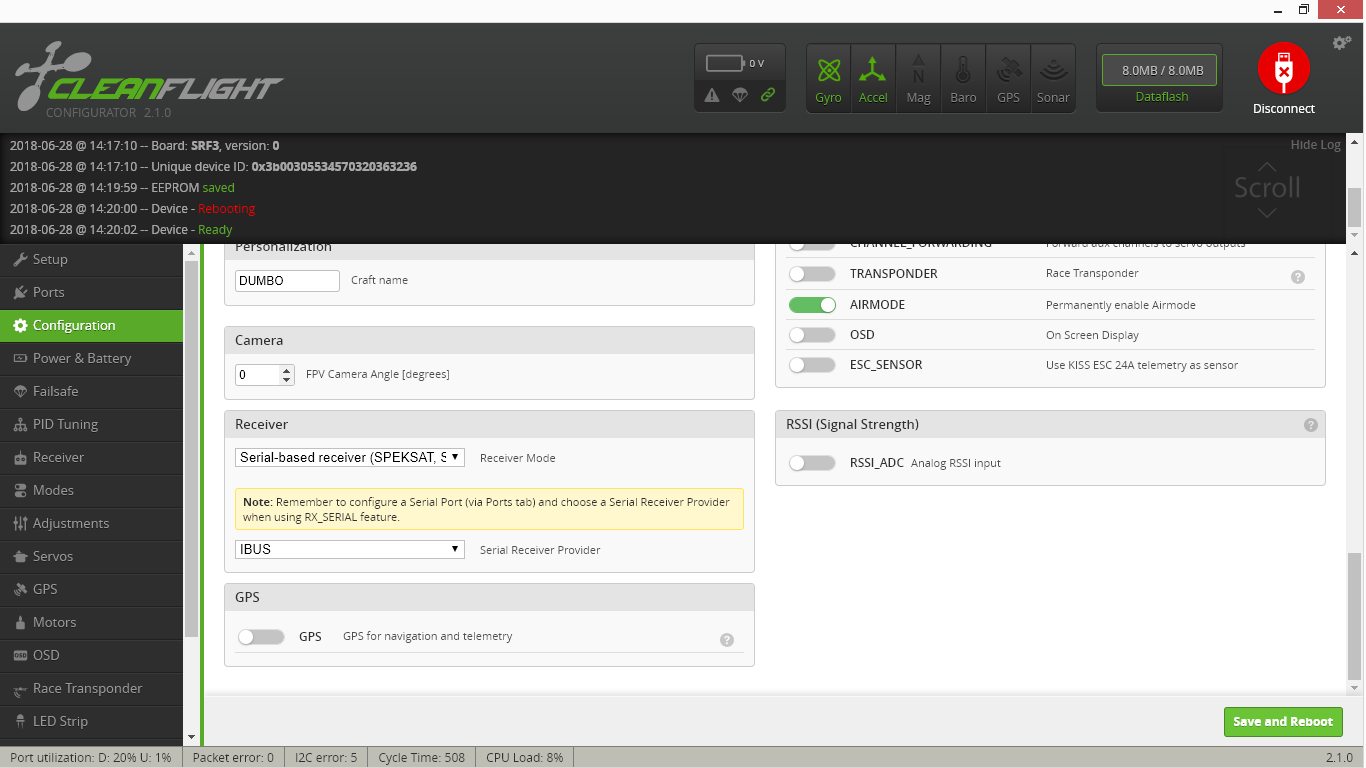
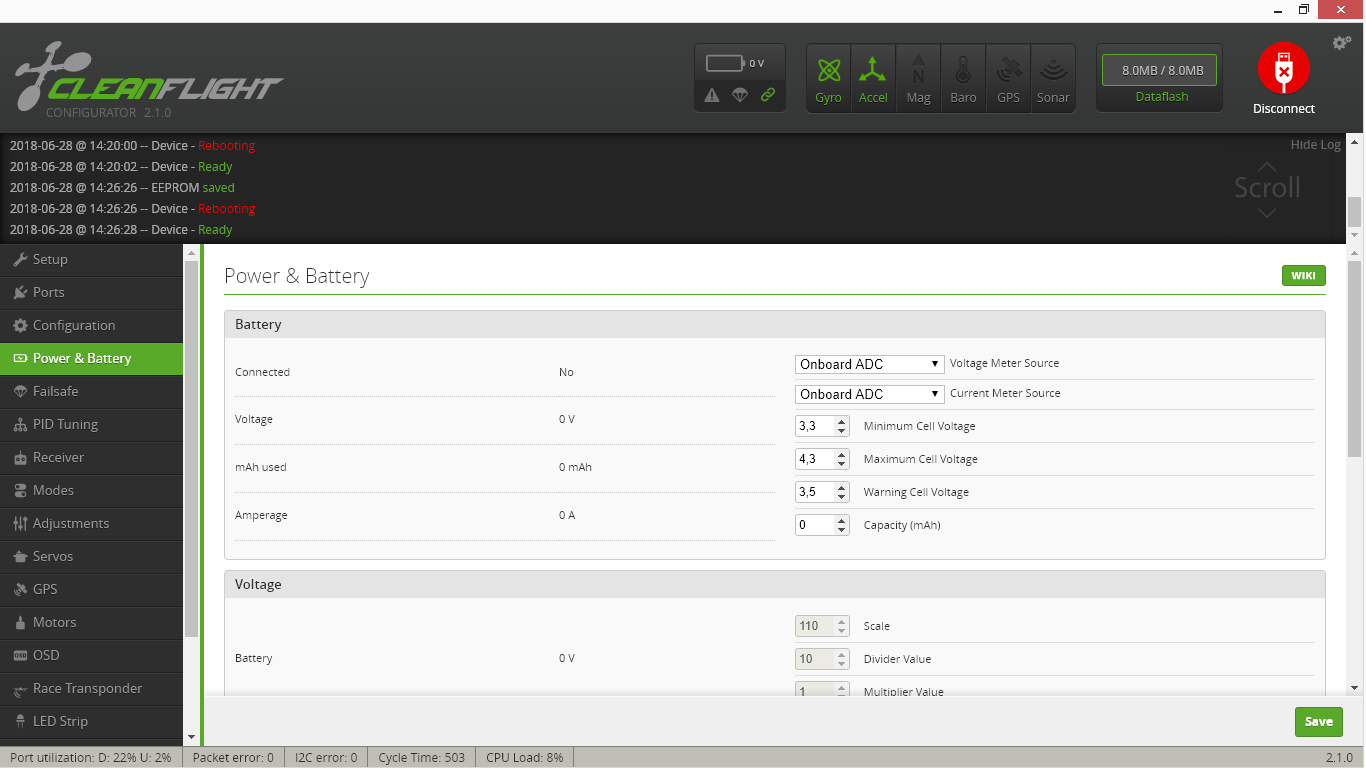
Pestaña Power and Battery
Aquí normalmente puedes poner cual es la capacidad de la batería con la que vas a volar (depende de la versión de Cleanflight, en la mía no). En un futuro podrás calibrar los sensores de voltaje y corriente para que sus lecturas se parezcan a la realidad. De momento puedes configurar los voltajes mínimos, es decir cuando comenzará a sonar la alarma del aparato y cuál es el voltaje crítico.
Recuerda, «save» para guardar.
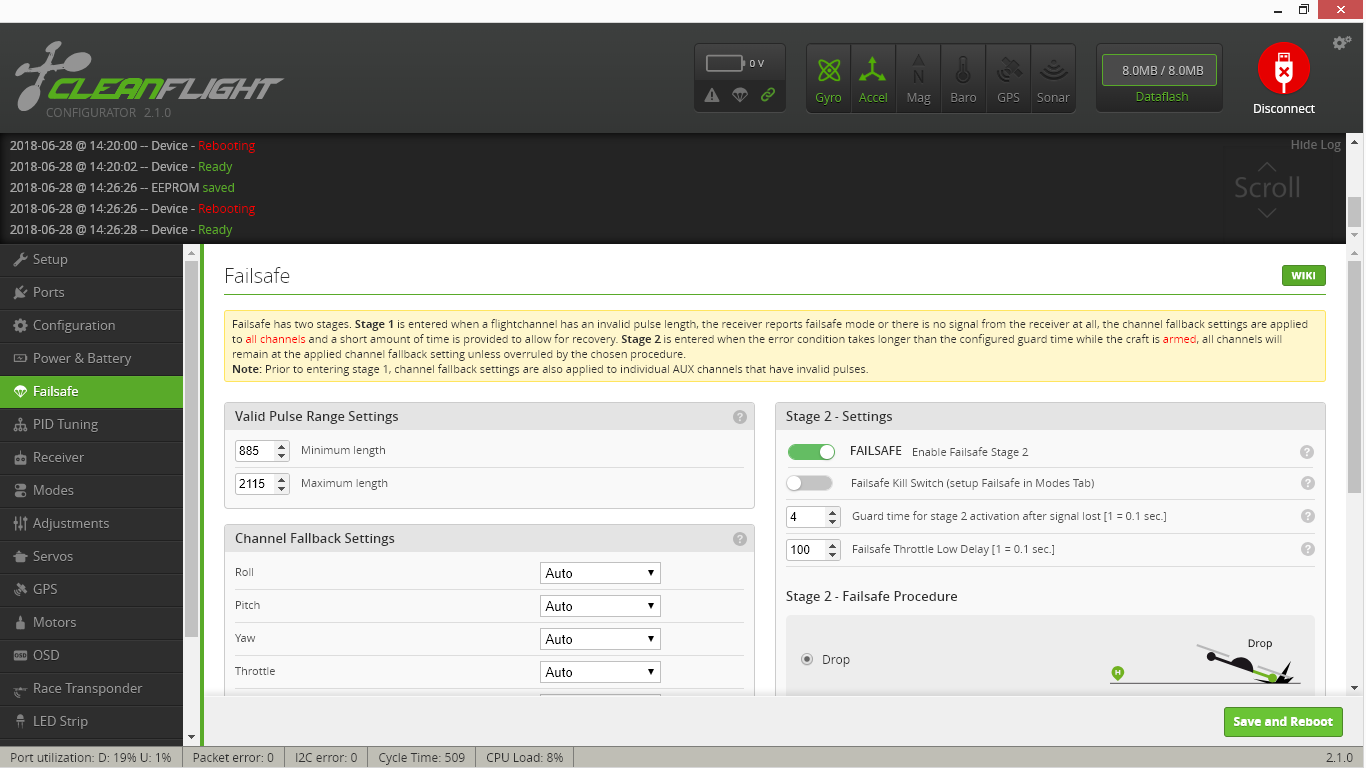
 Pestaña Failsafe
Pestaña Failsafe
Simplemente activamos el failsafe aquí. La modalidad de «Drop» ofrece más seguridad que la de «Land»
Dale a «Save and Reboot» antes de salir
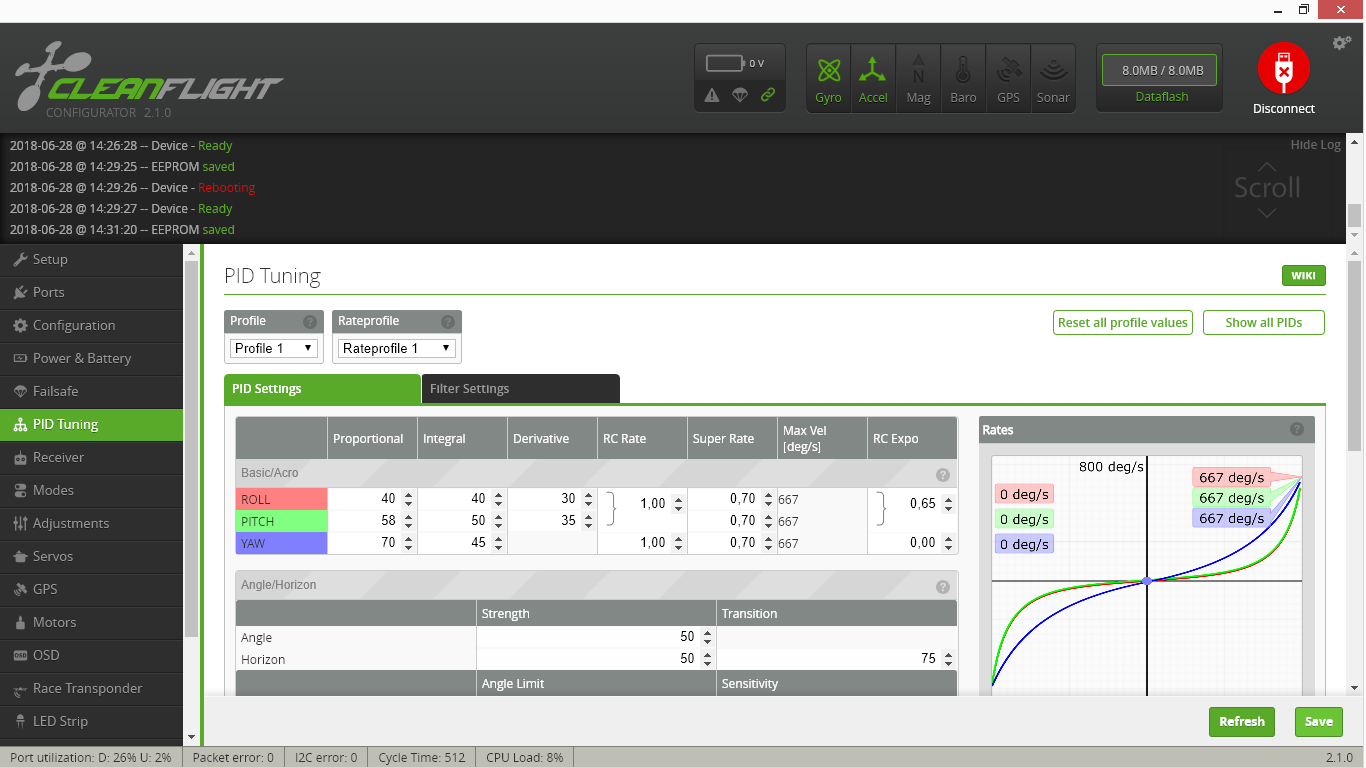
Pestaña PIDs
Aquí de momento no vamos más que aumentar el RC Expo a 0.65 para disminuir la sensibilidad del mando en las posiciones centrales. estoy asumiendo que eres un novato volando. Más adelante, cuando seas experto, ya ajustarás los PIDs más precisamente a tu gusto.
Dale a «Save» antes de pasar a la siguiente pestaña.
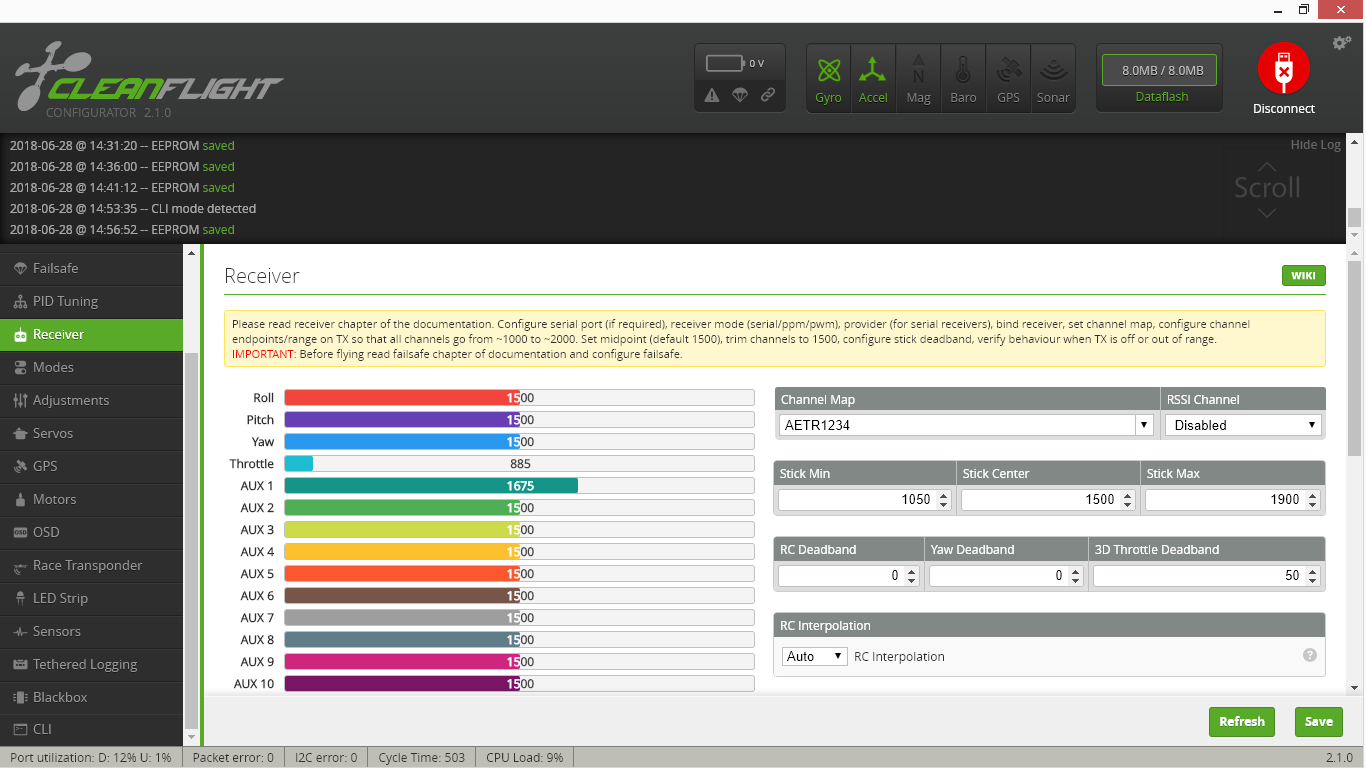
Pestaña Receiver (1)
Necesitas tener el dron montado con la radio (y posiblemente la batería también) para trabajar aquí. Recuerda montar también la antena de vídeo siempre que conectes la batería para no quemar el VTX.
Puesto que todos los radiotransmisores son distintos, no puedo más que presentar de un modo general el proceso, sin entrar en detalles de cada uno de los menús de los mandos. Consulta el manual de instrucciones del mismo si tienes problemas en este apartado.
Lo primero que debes hacer es crear un modelo en el radiotransmisor.
Ahora tienes que enlazar (Bind) el radio transmisor con el receptor. Este proceso suele hacerse normalmente poniendo el radiotransmisor en modo «Bind«, y dando corriente al receptor al tiempo que se pulsa el boton «Bind» del mismo. Al resetear (apagar y encender) el sistema ya está enlazado, y en este punto, si has configurado y salvado correctamente todo hasta ahora, cuando muevas los mandos de radiocontrol deberían moverse las barras en la pantalla.
Ahora vamos a realizar la asignacion de los 4 canales principales.
Puedes ver arriba a la izquierda cual es la asignación por defecto: AETR 1234, esto significa: Alerones (Ailerons, A) para el canal 1, Elevadores (Elevators, E) para el canal 2, Acelerador (Throttle, T) para el canal 3 y Timón (Rudder, R) para el canal 4. Si no sabes nada de los controles de un multrirrotor necesitas mirar este post de Aprender a volar
Pestaña Receiver (2)
Cambiar la asignación de canales es tan sencillo como cambiar el orden de las letras, así TARE 1234 asigna el acelerador (T) al canal 1, los alerones (A) al 2, el timón (R) al 3 y los elevadores (E) al 4.
Recuerda «Save» para guardar.
Deberías ahora trabajar con el radiotransmisor para ajustar las salidas. Busca en el radiotransmisor la pantalla de «OUTPUTS«.
Allí, para cada uno de los 4 canales principales tienes que ajustar los puntos medio, mínimo y máximo.
El objetivo es que para cada uno de los 4 canales AETR, con el mando de un canal en posición intermedia, el valor que leas en la pantalla del ordenador para la barra de ese canal sea 1500, con el mando en posición mínima el valor sea 1000 y con el mando en posición máxima el valor sea 2000. Debes hacer esto para los cuatro canales, y todo esto lo vas a hacer, como ya he dicho, trabajando con el radiotransmisor.
Si no puedes bajar el valor mínimo del acelerador hasta 1000, es posible que necesites redefinir el valor de Minimum Throttle en la pestaña Configuration y los valores de PPM Minimum Throttle de los ESCs en el BlHeliConfigurator. Te lo explicamos todo más adelante.[/one-half]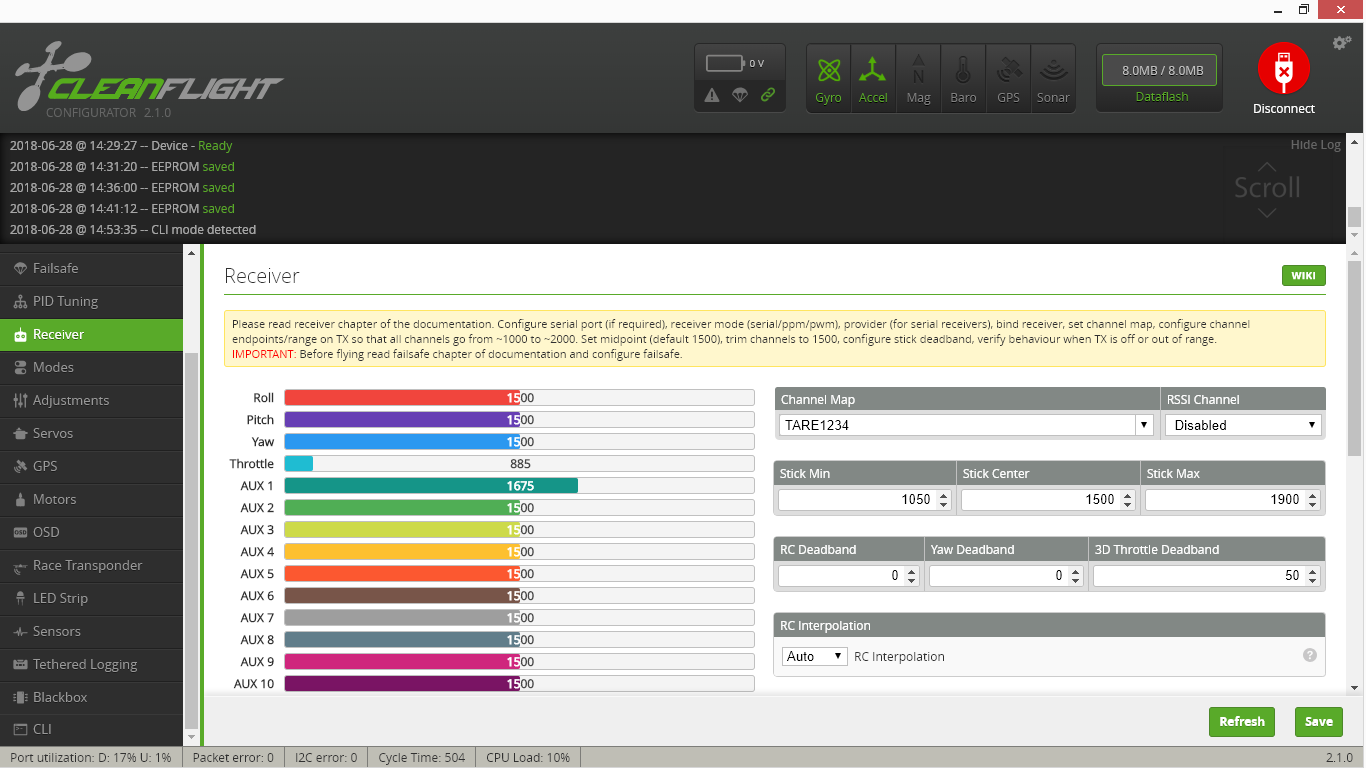
Pestaña Modes (1)
Seguimos trabajando con el radiotransmisor aquí, aunque no te hace falta tener nada conectado para dejar configurados los modos en el FC.
Voy a presentar una configuración que a mí me funciona, pero esto de los modos es muy personal, y cada uno lo pone a su gusto.
Lo primero que vas a hacer trabajando con el radiotransmisor es activar cuatro canales auxiliares. Los utilizarás para:
- Armado
- Modos de vuelo
- Failsafe
- Beeper
Asigna en el mando estos canales a los interruptores del radiocontrol que te sean más convenientes. En la pestaña Receiver de Cleanflight puedes comprobar que las barras de los canales se mueven al activar estos interruptores que acabas de asignar.
Vamos con los modos.
Asigna el armado al canal AUX 1
Asigna los modos Angle y Headfree el canal AUX 2. Puedes dejar las barras como se ve en la pantalla o como te sea más cómodo a tí. Veras en seguida que esto es muy intuituvo[/one-half]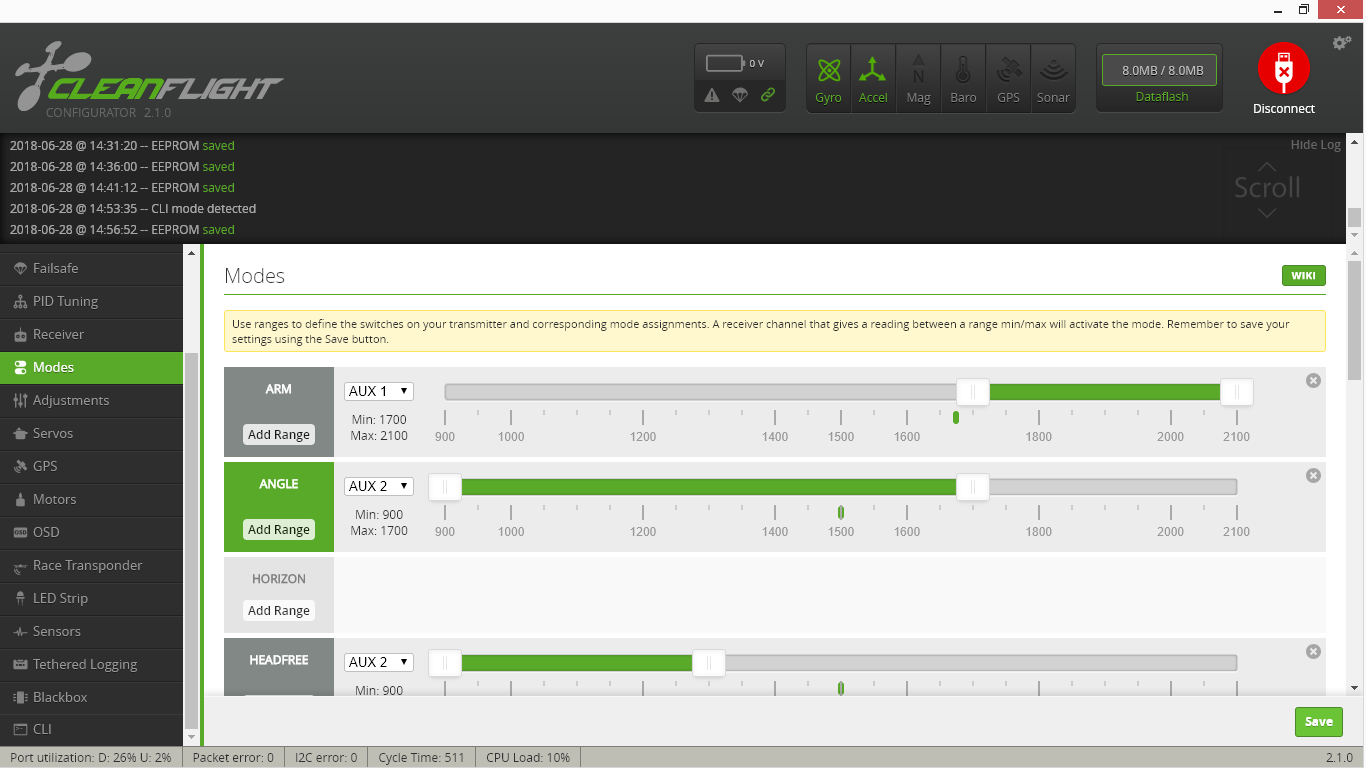
Pestaña Modes (2)
Asigna el Failsafe al canal AUX 3
Asigna el Beeper al canal AUX 4
Recuerda darle a «Save» antes de pasar de pantalla[/one-half]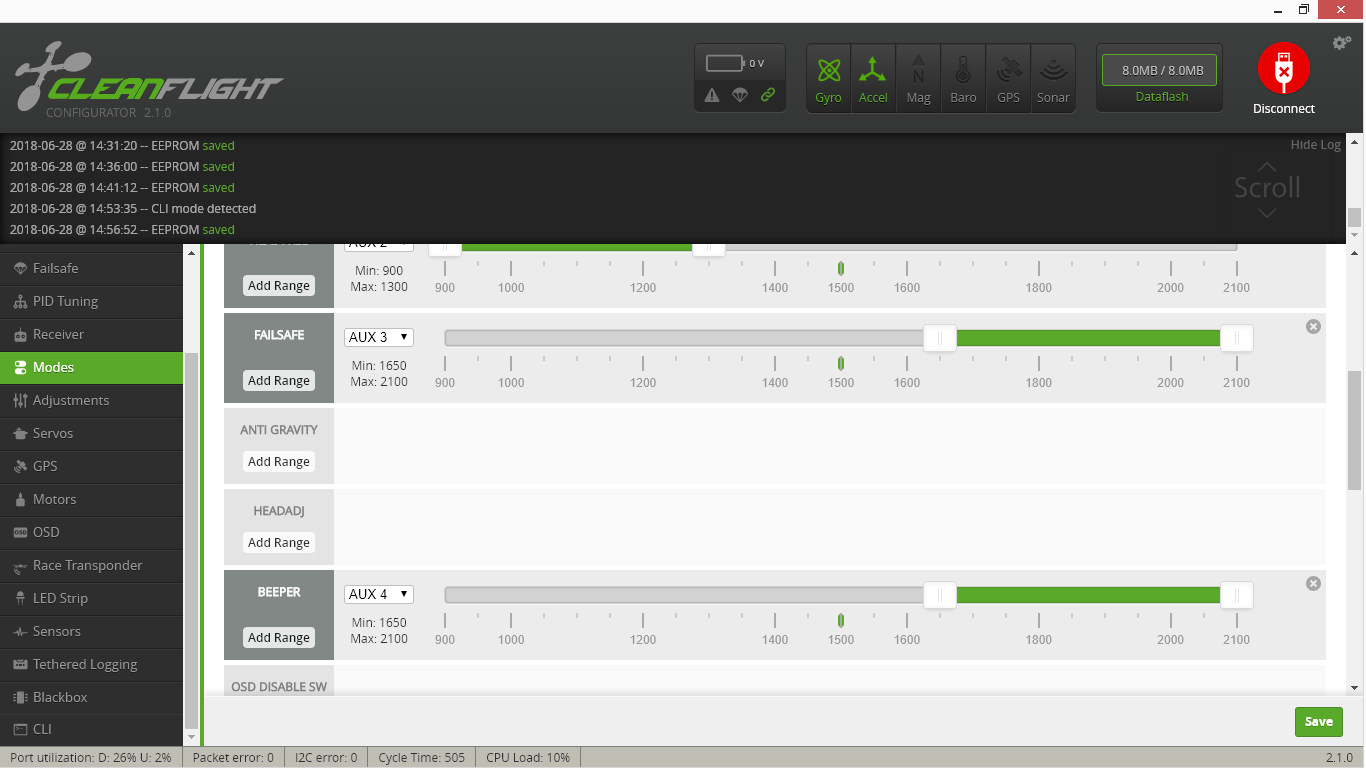
Pestaña Adjustments
Nada que hacer aquí[/one-half]
Pestaña Servos
Tu dron no tiene servos. Tampoco tienes nada que hacer aquí.[/one-half]
Pestaña GPS
Tu dron no tiene GPS. Tambien puedes saltarte esto.[/one-half]
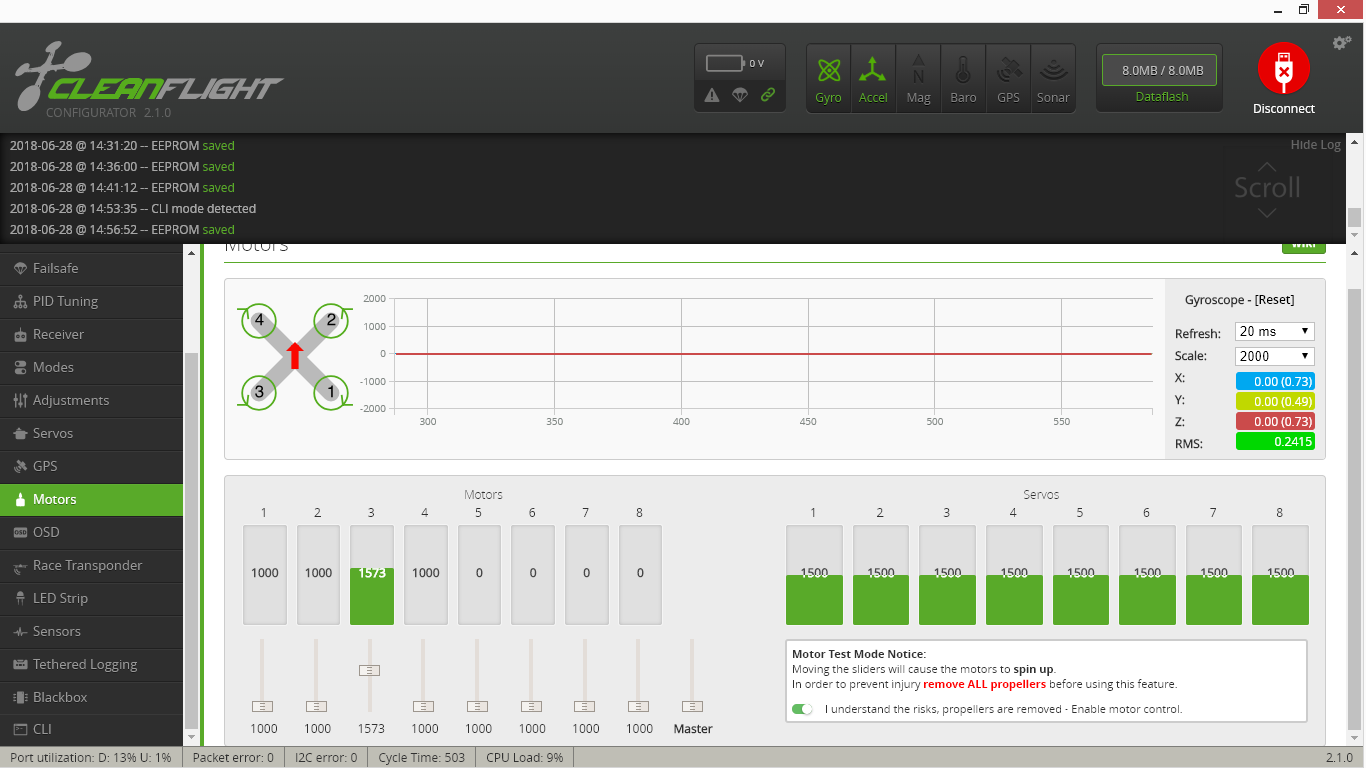
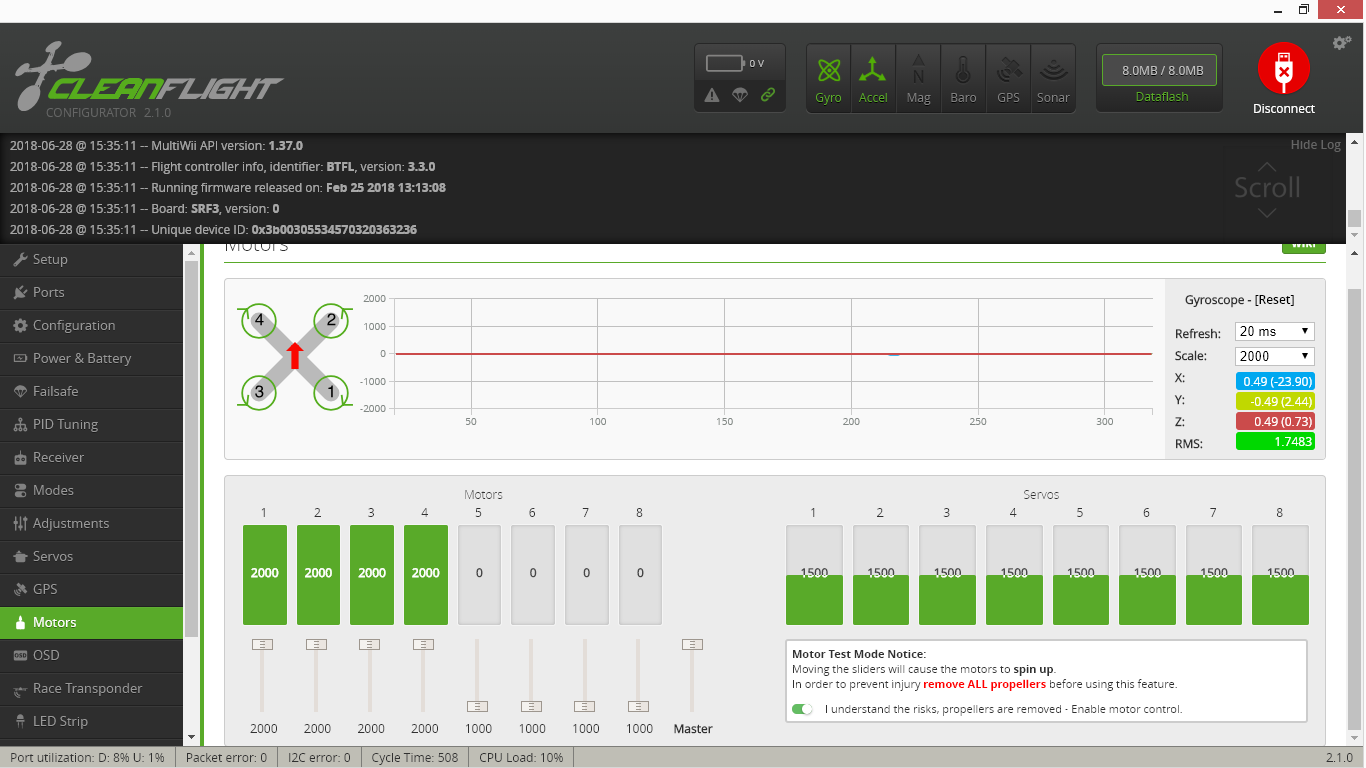
Pestaña Motors.
Si no tienes el dron conectado, todo lo que puedes hacer aquí es agitar un poco el FC y ver como las curvas de los sensores bailan.
Si tienes el dron conectado, con la batería puesta, entonces puedes trabajar. Lo primero que vas a hacer es RETIRAR LAS HÉLICES. Esto es importante.
Lo segundo que vas a hacer es verificar que has quitado las hélices. ¿Lo has hecho? Bien. Ahora podemos ponernos a trabajar.
Primero vamos a comprobar que los motores están correctamente conectados y cual es la dirección de giro de cada uno de ellos. Dale al botón en el que dices que entiendes los riesgos (los entiendes, verdad? y has quitado las hélices, verdad?) y activa cada uno de los motores por separado tomando nota de si se activa el motor que quieres y del sentido en el que giran cada uno de ellos.
Si los motores se activasen en un orden distinto al esperado, no hace falta des soldar nada. Puedes corregir la asignación de pines con el resource remapping. Aquí tienes un tutorial sobre el tema.
Comprueba si el sentido de giro es el correcto comparándolo con el esquema que hay en la pantalla arriba a la izquierda.
Toma nota de los motores que giran en sentido contrario al que deberían. Te explicaremos cómo invertir el giro y calibrar los ESCs a continuación. Lo primero que tienes que hacer es salir de CLEANFLIGHT. Ello lo vas a hacer desconectando tu máquina de la aplicación con el botón rojo de la esquina superior derecha de la pantalla (Disconnect)[/one-half]
[one-half]Ahora tienes que arrancar la segunda de las aplicaciones de las que hemos hablado: BlHeliConfigurator. Ésta es la pantalla con la que te recibe. Para funcionar con este configurador necesitas tener cargados los mismos drivers que para correr CLEANFLIGHT. Puedes encontrar enlaces para estos drivers en la parte inferior izquierda de esta misma pantalla.
Para el siguiente procedimiento necesitas tener las baterías del dron conectadas. (Recuerda conectar la antena para no quemar el VTX). Conéctate al configurador haciendo click en el botón azul de la esquina superior derecha de la pantalla (Connect). [/one-half]
[one-half]Una vez conectado, Haz click en el botón «Read Setup» para leer la configuración actual de los ESCs del dron.[/one-half]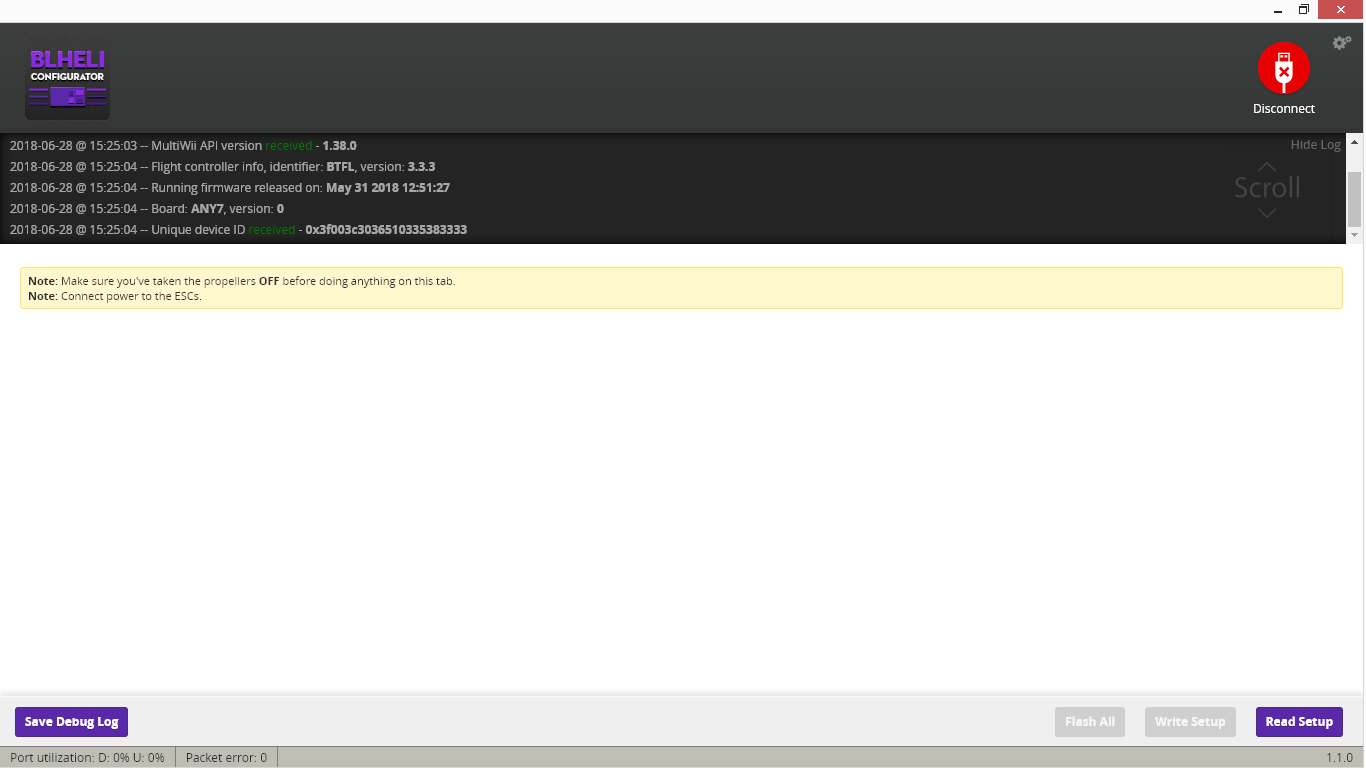
[one-half]Has entrado en el configurador de los ESCs. Aquí tienes una única pantalla en la que trabajar.
- Lo primero que vamos a hacer es activar los beeps de aviso y la baliza al volumen que desees. Son las barras de Beep Strength y Beacon Strength. Yo como soy un poco duro de oído las pongo a tope. También configuras aquí el tiempo que ha de pasar antes de que se active la baliza. Yo lo tengo fijado en 5 minutos.
- Ya que estamos en ello, vamos a desactivar la casilla de «Programming by TX«
- Seguimos ajustando el sentido de giro de los motores. Anteriormente apuntaste cuales giraban al revés. Ahora puedes seleccionar el sentido de giro eligiendo en cada ESC «Normal» o «Reversed«
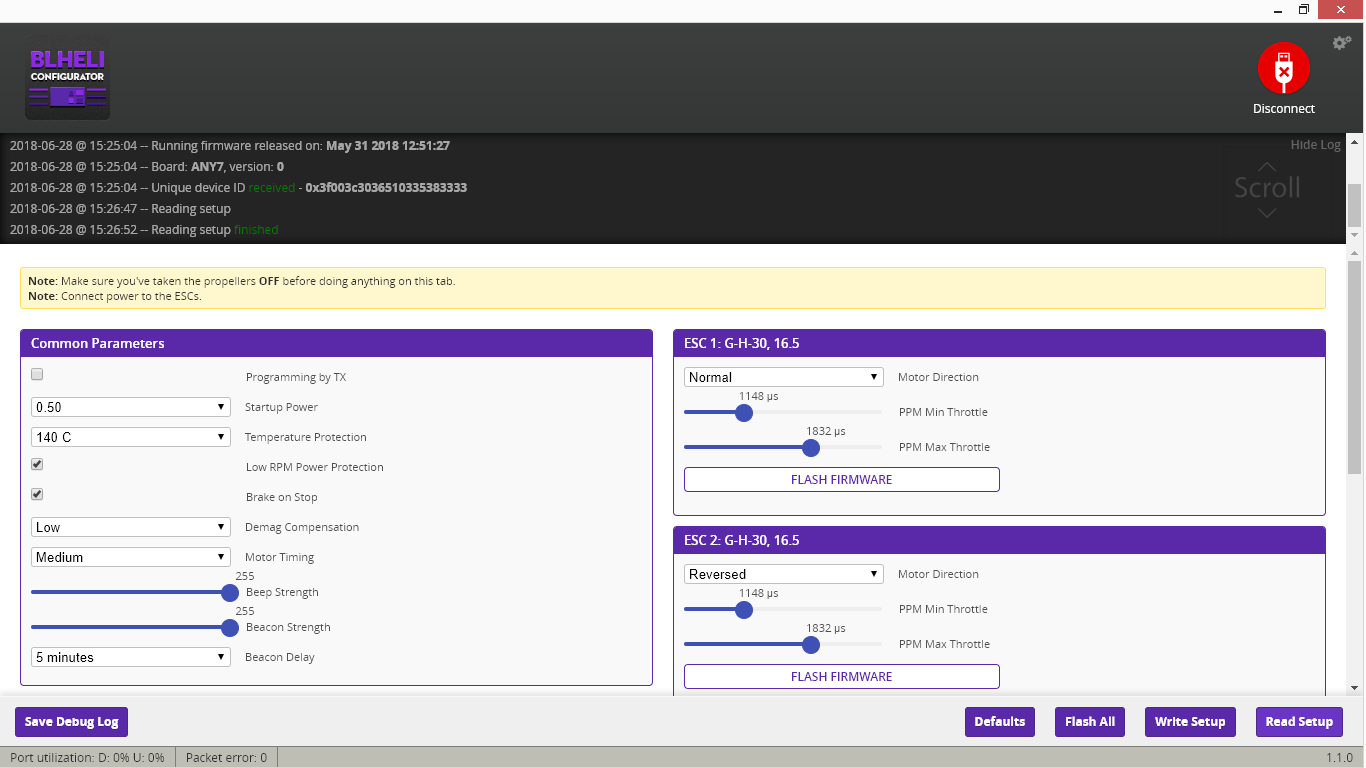
- Lo siguiente que hacemos es ajustar los valores máximos y mínimos de la entrada del acelerador para cada uno de los variadores (PPM Min Throttle y PPM Max Throttle). Ajusta estos valores a 1050 y 1950 aproximadamente. Los valores de PPM Min Throttle (1050) deberían ser algo menores que el valor definido para Minimum Throttle (1070) en la pestaña Configuration.
Ya has acabado aquí. Ahora tienes que salvar tu configuración haciendo click en el botón «Write Setup«. Puedes desconectarte de la aplicación ahora (botón rojo de la esquina superior derecha»Disconnect«) y volver a conectarte a la aplicación Betaflight. [/one-half]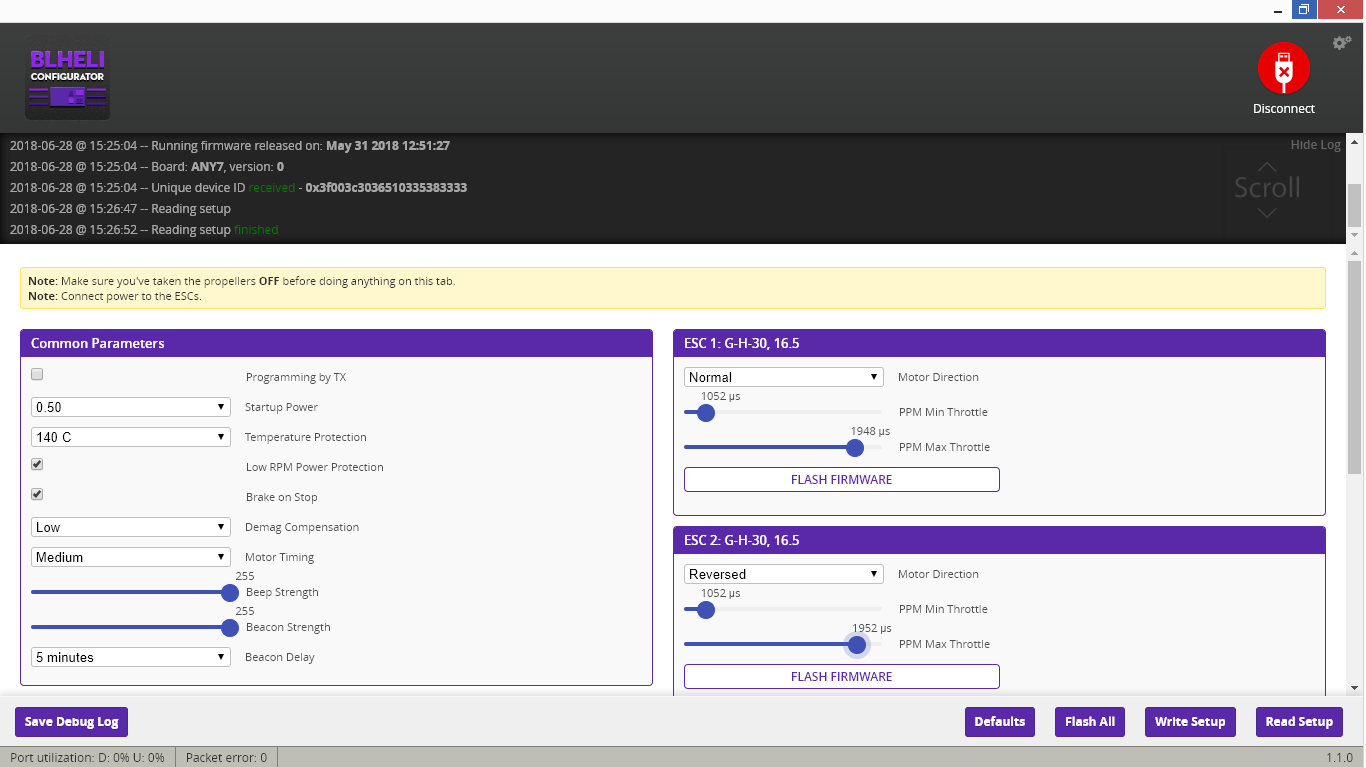
Ya en Betaflight, ve a la pestaña de motores. Lo siguiente que vamos a hacer es calibrar los ESCs.
- Desconecta la batería.
- Dale al botón donde dices que entiendes los riesgos.
- Mueve la barra de «Master» a tope
- Conecta la batería. Los ESC harán una musiquilla
- Baja la barra de «Master» a cero
- Los ESCs hacen otra musiquilla
- Desconecta la batería
Los ESCs ya están calibrados. Has acabado de trabajar con los motores. Puedes pasar a la siguiente pestaña.
Pestaña OSD
Tu dron no tiene OSD. No tienes nada que hacer aquí.[/one-half]
Pestaña Race Transponder
Tampoco tienes Transpondedor de carrera. Te puedes saltar esto también.[/one-half]
Pestaña Led Strip
Tu dron tiene LEDs, pero éstos no son programables, así que tampoco tienes nada que hacer aquí.[/one-half]
Pestaña Sensors
Nada que hacer aquí. Te puedes saltar esto tambíen.[/one-half]
Pestaña Tethered Logging
Puedes ignorar esto también.[/one-half]
Pestaña Blackbox
No te hace falta liarte con la caja negra de momento. Ignora esta pestaña [/one-half]
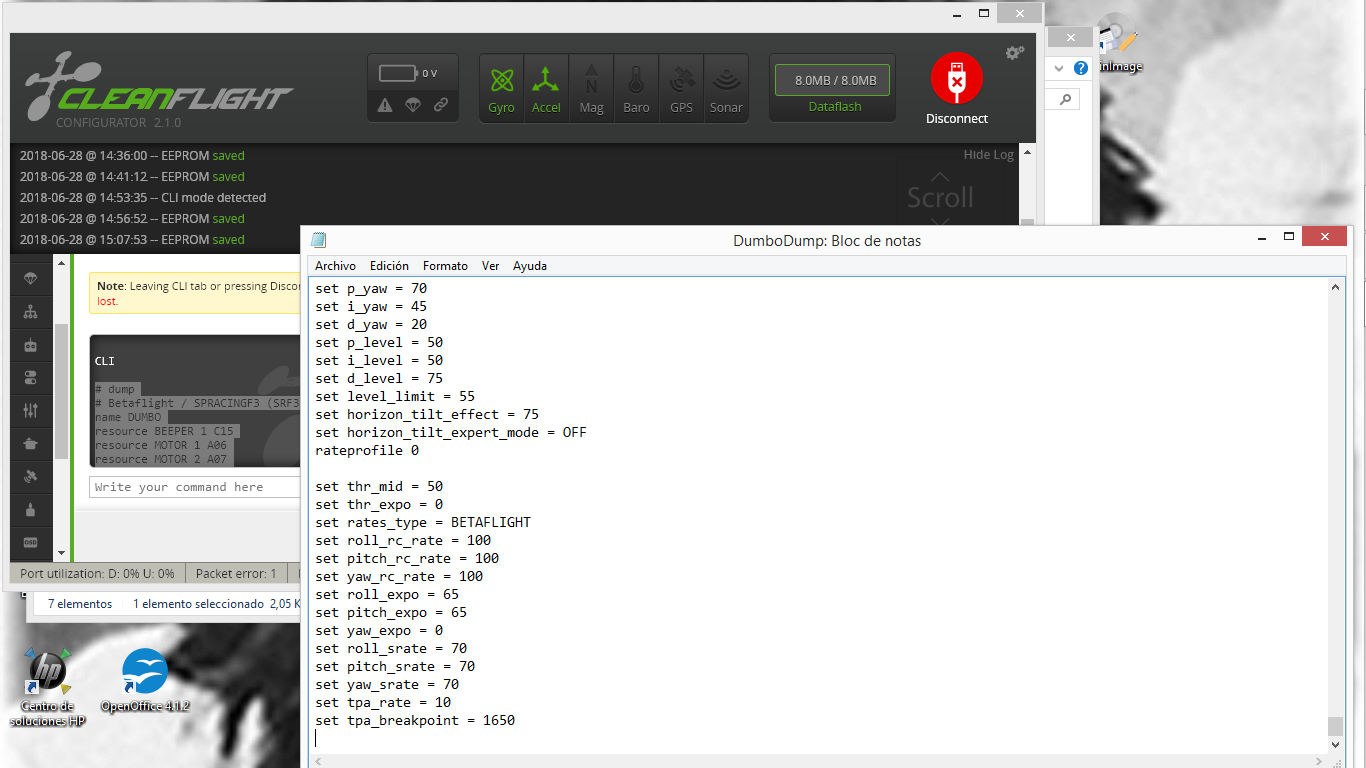
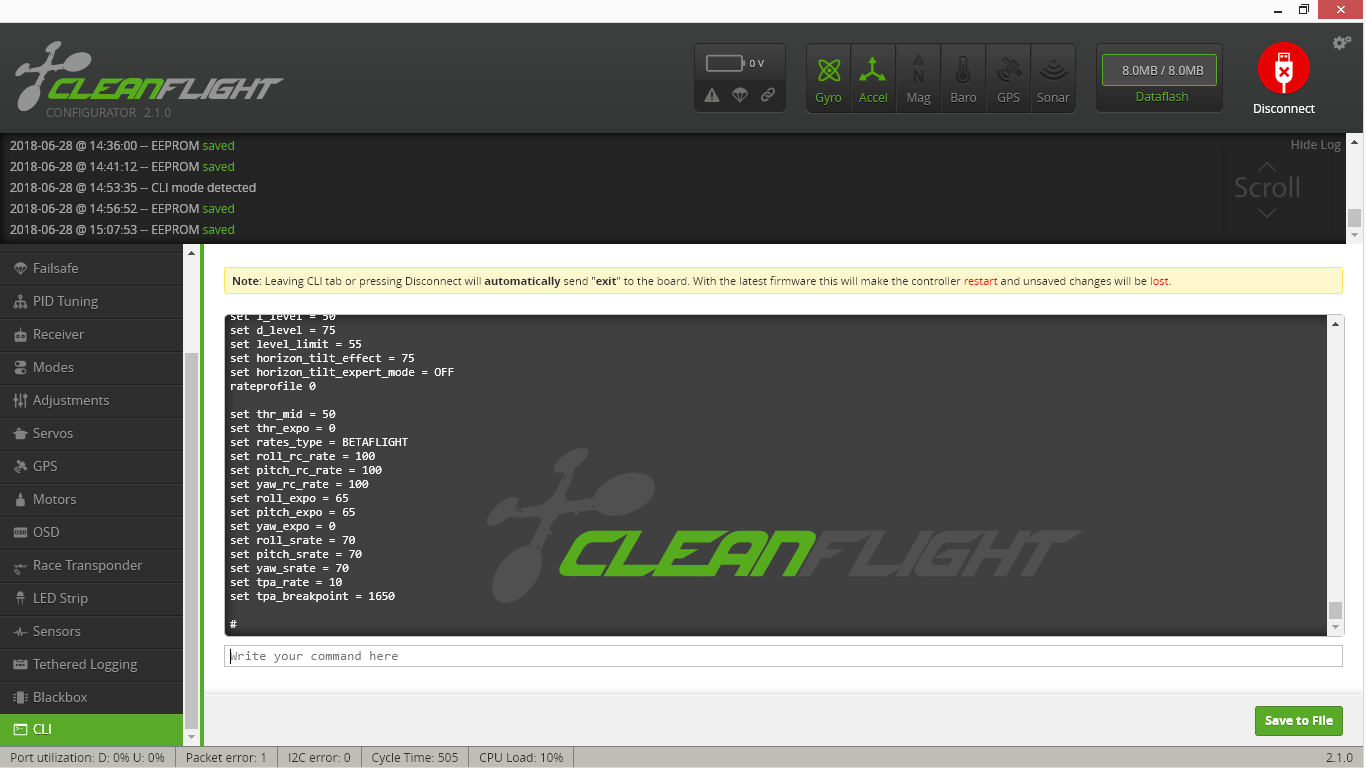
Pestaña CLI
Llegaste al Command Line Interface o CLI.
Empieza tecleando «dump» en la linea de comandos en la parte inferior de la pantalla[/one-half]
[one-half]Selecciona todo el texto con el ratón y haz Control C para copiarlo en el portapapeles. En este punto ya has terminado de trabajar con CLEANFLIGHT, puedes desconectarte de la aplicación haciendo clic en el botón rojo (Disconnect) y también puedes desenchufar el cable USB.[/one-half]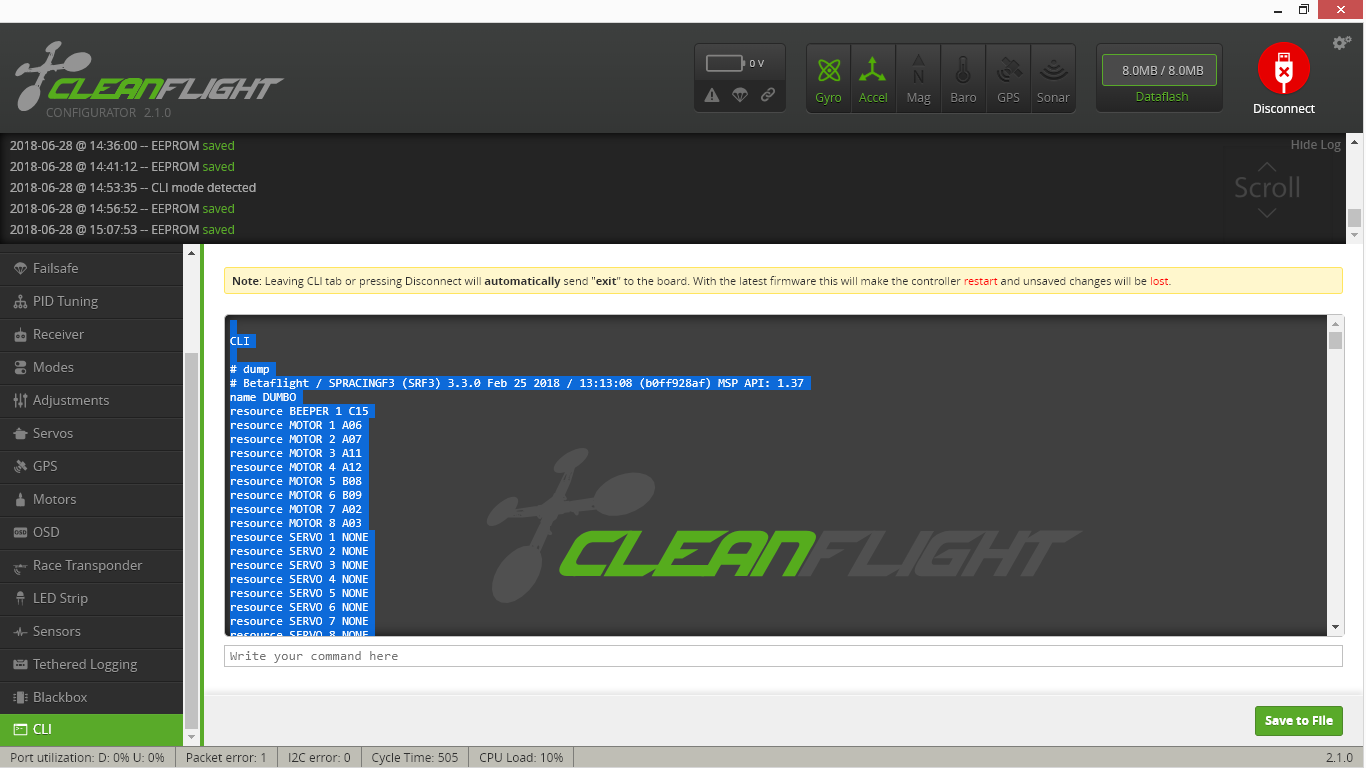
[one-half]Abre un archivo nuevo del block de notas y pega el texto seleccionado con Control V. Guarda este archivo. En el futuro, podrás recurrir al mismo para restaurar la configuración del dron. Esto se hace pegando todo el texto del «dump» en la linea de comandos del CLI y tecleando «save«.
Has acabado!! Dumbo ya está configurado y listo para volar. ¿Has practicado con el simulador? Entonces tú también estas listo. Vamos con ello![/one-half]