mBlock: Controlar a 4-Bot con el Nunchuk
Siguiendo el mismo recorrido que hemos hecho programando con el IDE de Arduino el robot cuadrúpero 4-Bot, en esta ocasión presentamos el equivalente a la sesión del Nunchuk utilizando mBlock. Queríamos que pudierais construir los vuestros lo antes posible y parece que os interesaba poder hacerlo con bloques, así que lo hemos hecho lo más rápido que hemos podido.
Para poder usar el Nunchuk vamos a tener que utilizar unos bloques nuevos que hemos creado para ello, así que recordad que tenéis que bajar e incorporar a mBlock el archivo que os indicamos en la sesión anterior.
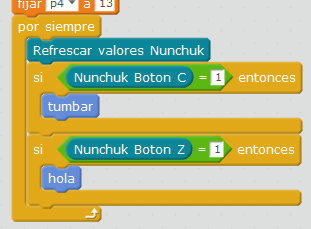
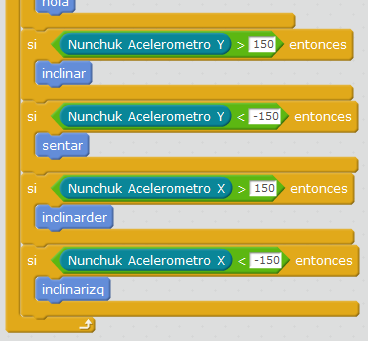
En la sesión que presentamos vamos a presentar los bloques que hemos introducido y a explicar cómo se utilizan. Son muy sencillo así que no va a costar demasiado. En resumen hemos creado los bloques necesarios para leer los botones, el joystick y el acelerómetro del Nunchuk. Una vez tengamos los valores no tenemos más que crear estructuras condicionales para que el robot nos obedezca y haga lo que se nos antoje.
Aquí tenéis el enlace a la nueva sesión:
Y a riesgo de ponernos pesados, recordad que estamos deseando que creéis vuestras propias versiones de mBlock y que nos lo hagáis llegar. Un saludo desde Prometec y hasta la próxima.
