“RC Rate” y “Roll / Pitch / Yaw Rate”
El chiste era algo así:
-Te gustaría hacer el amor?
– Sí
– En tu casa o en la mía?
– Ah! Pero contigo?
Todo esto viene a cuento porque veo que si se dejan las explicaciones a medias se corre el riesgo de llevar a la gente a la confusión.
Como este mundo tan grande está lleno de todo tipo de gente, seguro que hay alguno que después de leer el post que hice sobre como ajustar los PIDs, conectó su dron al portatil y se dijo: «Vale, muy bien. Ahora ya entiendo para que sirve esto, pero sólo ha explicado la mitad de la pantalla. Aquí hay un montón de cosas más que supongo que para algo deben servir.»
Cierto. Puede que leas «Roll, Pitch and Yaw Rate» y lo único que se te ocurra pensar es «Oh yeah», porque para estas alturas ya has aprendido que mientras el aparato vuele, en esta pantalla de los PIDs, si no sabes para que sirven las cosas, lo mejor suele ser dejarlas como están.
Vamos por tanto con una segunda entrega básica sobre la pestaña de los PIDs. Como podrás ver, en esta pantalla de Betaflight todavía hay más cosas que explicar, como una misteriosa pestaña etiquetada como «Filtros». Poco a poco ya llegaremos.
De momento, como anticipo del contenido del post te diré que estos parámetros Rate y Expo, están muy relacionados con los PIDs y te van a ser muy útiles para hacer que el dron vuele como tú quieres, porque sí, tú ahora puedes volar un dron medianamente bien, pero quizás tu pulso tembloroso haga que el vuelo no sea tan fluido como querrías. ¿Podrías reducir la sensibilidad del mando en las posiciones intermedias para mejorar esto? La respuesta es un rotundo SÍ. Leyendo este post podrás aprender cómo hacerlo.
Si no sólo quieres volar, sino que además quieres volar bien, este post es imprescindible para saber afinar el comportamiento de tu dron.[/box]
Este artículo explica la diferencia entre RC Rate, Expo y Super Rate, cómo estos parámetros afectan al comportamiento de tu mini quad, y cómo ajustarlos.
Posiblemente también estés interesado en el ajuste de los PIDs.
Qué es RC Rate y Expo?
Para ponerlo en corto, RC rate ajusta la velocidad de rotación para el desplazamiento de los mandos. Expo ajusta la posición central del mando frente a la posición a tope del mando.
RC Rate
RC Rate es el multiplicador de las entradas de tu mando para los tres ejes (cabeceo, alabeo y guiñada). Un solo valor para los tres ejes. Si incrementas el RC Rate, el dron responderá más agresivamente a las entradas en el mando. Se puede pensar en el RC Rate como un ajuste de la sensibilidad del mando.
RC Expo
Generalmente, Expo es un valor porcentual entre 0% y 100%. Incrementándolo, reduce la sensibilidad del mando en las posiciones centrales de éste.
Puedes imaginar la salida del control a la que el Expo se aplica como una “U”, más plana en el centro. Con un Expo del 0% no existe reducción en la sensibilidad, y la salida tendría forma de “V”. Con un Expo elevado, el tramo horizontal de la “U” se aplana. El Expo se suele emparejar con un Rate elevado, de modo que el piloto pueda realizar maniobras agresivas manteniendo un control preciso en las posiciones centrales del mando.
No existen unos valores equivocados para Rate y Expo. Cualquier valor está bien si te va bien a ti. Si tienes el pulso tembloroso, un Expo más elevado del que suele llevar la mayoría de la gente le puede ir mejor a tu vuelo.
Pitch / Roll / Yaw Rate y Super Rate
En el pasado, hemos usado diferentes ajustes separados para el cabeceo, alabeo y guiñada. Los ajustes de Pitch / Roll / Yaw Rate cambian la velocidad a la que el dron gira en un determinado eje de rotación. Por ejemplo, si incrementas el Roll Rate, el quad girará alrededor del eje de alabeo más rápido que con un rate más bajo.
Quizás te estés preguntando: Bueno, pero ya tenemos un RC Rate, para qué queremos otro para cada eje?…
Como sabemos, en el origen de Baseflight, Betaflight y Cleanflight se encuentra Multiwii. Entonces era más sencillo, sólo había RC Rate y Expo, y eso era todo.
A medida que los mini quads se fueron haciendo más populares, más pilotos demandaban Rates más altos para realizar giros más rápidos y movimientos más locos, así que se añadieron nuevos Rates en la controladora MW2.3PID para relajar los PIDs a medida que las entradas en los mandos aumentaban y para incrementar la velocidad máxima de rotación para las posiciones extremas de los mandos.
A esta función se le conoció como “Super Expo” en su momento, y básicamente significa que puedes tener una sensibilidad moderada en las posiciones centrales del mando para un vuelo normal y al tiempo poder realizar giros súper rápidos en las posiciones extremas de los mismos.
Con el controlador MW2.3PID, los Rates de Pitch / Roll / Yaw tiene cierta influencia en el controlador PID. Por ejemplo, al incrementar los Rates de Pitch / Roll / Yaw, puedes hacer giros más rápidos, pero tu cuadracóptero tendrá mucho menos control en las posiciones extremas de los mandos. En realidad el efecto es en todo el rango de movimiento de los mandos, no sólo en los extremos.
Super Expo de Cleanflight
En 2015, Cleanflight introdujo más controladores PID en el software, como Re-Write y Luxfloat. En estos controladores PID, los Rates P/R ya no tienen efecto en los valores PID.
Esto significa que los ajustes de los rates de Pitch / Roll que todavía están ahí ya no te dan el efecto “Super Expo”. Ahora son simplemente multiplicadores que incrementan linealmente el Rate general cobre el RC Rate existente. En la última versión de Betaflight, se vuelve a recuperar “Super Expo” llamándose ahora “Super Rate” o “S.Rate”. Ya se sabe, estas cosas vienen y van…
Super Rate en Betaflight
Super Rate cambia la precisión en las posiciones centrales del mando y la salida que producen las entradas en las posiciones extremas de los mandos.
Es un poco como una combinación de Rate y Expo. Proporciona más flexibilidad en el ajuste y el control, pero hay que jugar con RC Rate, Expo y S.Rate para lograr la curva deseada mientras se mantiene la salida deseada para las entradas a tope en el mando del radiocontrol.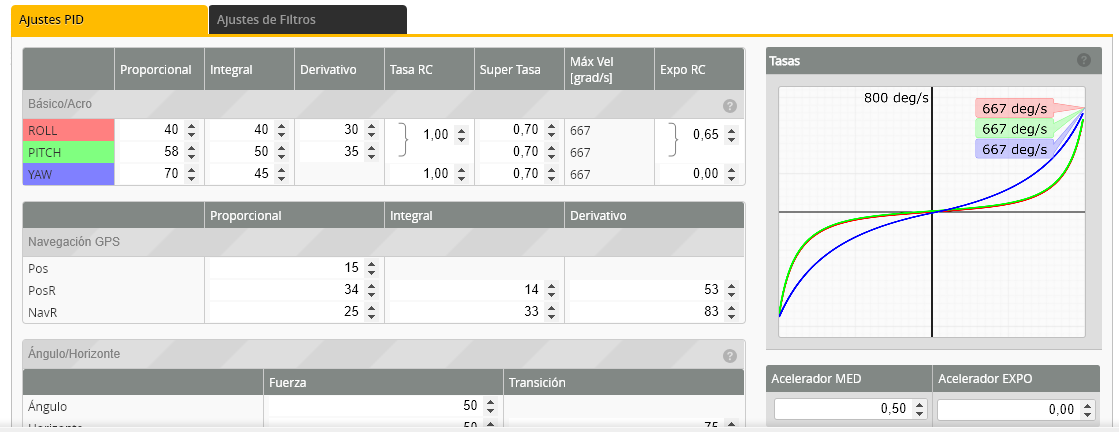
Cómo ajustar RC Rate / Expo y Super Rate
Cuando se vuela en modo manual o acrobático, lo mejor es ajustar primero el RC Rate simplemente volando un poco sin realizar maniobras acrobáticas, para asegurarse que que el dron responde rápidamente a las entradas en los mandos. Se puede empezar con un valor comprendido entre 0.9 y 1.2.
Se puede entonces ajustar Super Rate para dar vueltas y hacer acrobacias hasta estar satisfecho con la velocidad de rotación. Esto afectará también a la sensibilidad en las posiciones centrales del mando, así que es probable que haya que ajustar Rate otra vez, pero de nuevo Rate afectará el comportamiento en las posiciones extremas del mando… Es posible que haya que hacer este proceso varias veces antes de conseguir la respuesta deseada.
Finalmente, se puede añadir un poco de RC Expo para tener un control algo más preciso en las posiciones medias del mando. De 0.05 a 0.1 es un buen rango para comenzar.
Todos los diferentes softwares de controladores de vuelo tienen diferentes rangos de escala de PID, Rate y Expo, así que no merece la pena intentar relacionar dichos valores de un software a otro. Simplemente debes mirar si determinado valor debería ser más alto o más bajo.
Hay que evitar aplicar Expo en la radio (TX), porque esto reduce la resolución del mismo. Ajusta Expo únicamente en el controlador de vuelo.
Acelerador medio (Throttle Mid) y Expo
Por último, junto a RC Rate y Expo, se puede encontrar Acelerador medio y acelerador Expo ( Throttle Mid y Throttle Expo).
Throttle Mid, es por defecto la mitad del acelerador. Hay a quien le gusta ajustar este valor a un punto en el que el dron se mantiene en el aire sin cambiar su altura. Si hay que dar gas pasado este punto medio del acelerador para conseguirlo, entonces es mejor incrementarlo. Si tu quad tiene una relación Potencia / Peso mayor que 2, es decir que se mantiene en el aire con menos de medio gas, es mejor disminuirlo para mantener más fácilmente una altura constante. Si el ajuste es Expo = 0, entonces se puede ignorar el medio gas. Cuando se vuela un mini quad que tiene potencia, si el punto medio del acelerador está situado en un punto más alto que el de vuelo estático, puede ser muy difícil aterrizar sin estrellarse.
Throttle Expo indica cómo de plana quieres que sea la respuesta del aparato a posiciones medias el acelerador. Cuanto más plana sea la curva, más suave es la respuesta. Un poco de Throttle Expo (<10) proporciona mayor resolución en el control del acelerador, lo que especialmente útil cuando se vuela en proximidad a otros drones y haciendo carreras.