Aprendiendo algo del Firmware para un dron

Firmware para FCs. Ya sólo el título hasta asusta un poco. Es posible que no sepas lo que es el firmware, pero espero que recuerdes que el FC es el controlador de vuelo.
Poniéndolo en palabras llanas, el firmware es el software que controla el computador que hace volar el dron. Ya más sencillo no se puede explicar. Si no sabes lo que es el software quizás deberías estar mirando vídeos de cómo hacer calceta.
Puedes estar tranquilo (o quizás decepcionado, según tu nivel de frikismo) que no vamos a empezar programando. En este post simplemente vamos a detallar los distintos firmwares que hay disponibles y para que se usan cada uno de ellos.
Te recomiendo leerlo, es muy interesante. Te puede ayudar a ver claramente qué es lo que quieres y me refiero a los drones, no desde un punto de vista existencial…
Firmware para control de vuelo para mini quads.
En este articulo explicaremos brevemente las diferentes opciones de firmware disponible para controladoras de vuelo de multicópteros.
Muchos de estos firmware tienen también la capacidad de volar aviones de alas fijas y otros vehículos aéreos no tripulados. Pueden incluso estabilizar vehículos terrestres y robots, hay todo un mundo ahí dentro, pero de momento nos vamos a centrar en los mini quads.
Para más información, aquí tienes un enlace a un tutorial sobre FCs
Este es el firmware que cubriremos en este post:
- Baseflight
- Cleanflight
- Betaflight
- iNav
- Raceflight
- KISS
- OpenPilot
- LibrePilot
- TauLabs
- dRonin
Baseflight
De código abierto. Gratuito. Fue uno de los primeros firmware de 32 bits basados en el firmware de 8 bits Multiwii Flight Controller.
Hoy día el Baseflight ya no se actualiza y se considera desfasado. A pesar de ello, Baseflight fue el gran precursor de todo el firmware de vuelo que usamos hoy día y por ello merece ser mencionado.
Cleanflight
De código abierto. Gratuito. Se descarga a través de una aplicación de Google Chrome. Nacido como un esqueje de Baseflight, con la intención de ser una versión de su predecesor con «código limpio» para permitir un mantenimiento y un desarrollo posterior más sencillo, rápidamente se convirtió en el confiable firmware de vuelo ampliamente difundido que es hoy día. Cleanflight se dividió en Betaflight y iNav. Muchas nuevas funciones se añadieron y volvieron a confluir de nuevo en un Cleanflight 2.0, definitivamente un buen firmware que funciona en muchos FCs y que tiene un buen seguimiento.
Betaflight
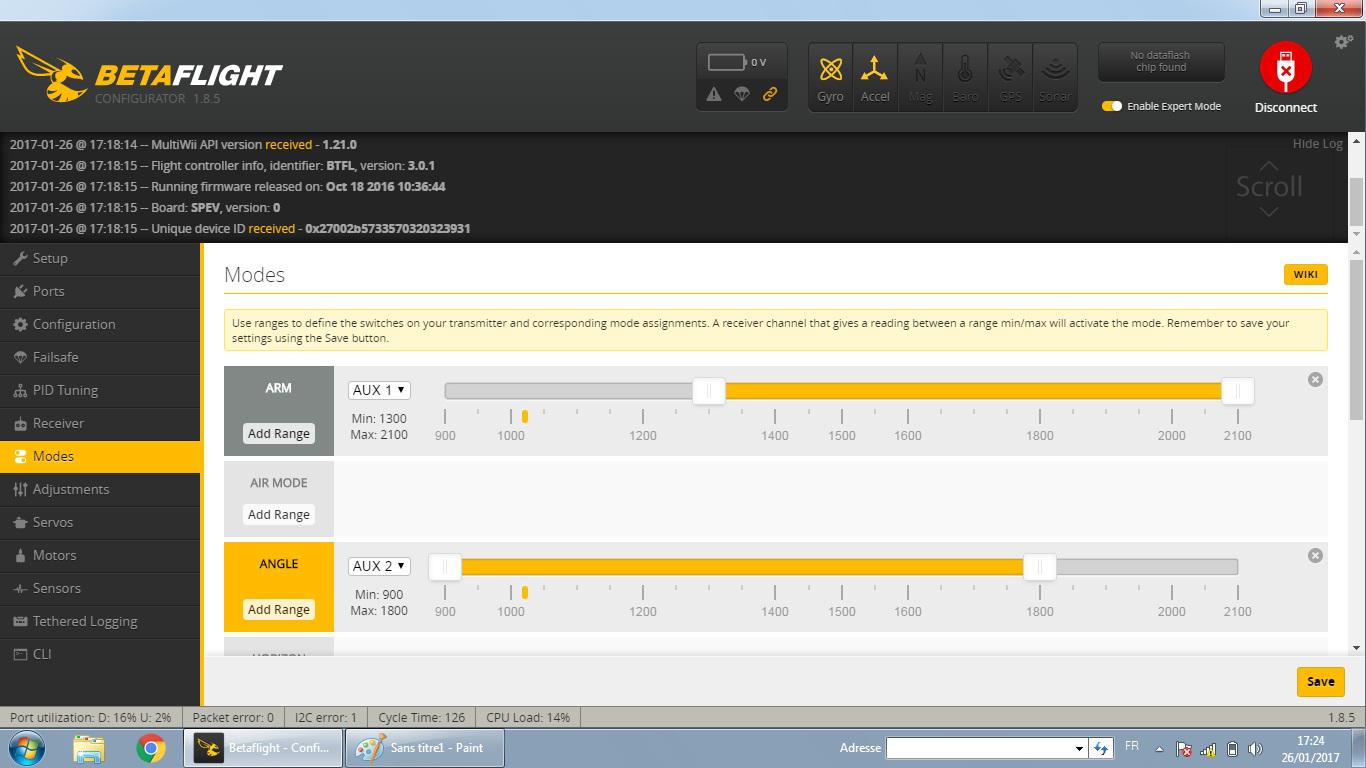
De código abierto. Gratuito. Se descarga a través de una aplicación de Google Chrome. Betaflight se desgajó de Cleanflight con el énfasis puesto en desarrollar nuevas funciones para los mini quads. Hoy día es el software para control de vuelo más ampliamente usado y por buenas razones: soporta una gran variedad de Fcs, la configuración por defecto vuela muy bien y está lleno de funciones para afinar el ajuste de la máquina para los competidores serios, los pilotos de estilo libre y también los principiantes.
Sigue siendo de código abierto y goza de muchos contribuyentes y se actualiza regularmente.
Sin embargo, aunque todas sus opciones lo convierten en el software de vuelo más potente y flexible que hay ahora, también lo hacen uno de los más complejos de configurar, aprender y usar. A pesar de todo, Betaflight es probablemente el firmware de FC más usado y se pueden encontrar muchos tutoriales para aprender a usarlo en Youtube. Con el tiempo iremos escribiendo tutoriales de como configurar Betaflight por primera vez, ajustar el tiempo de ciclo más adecuado, el Airmode, El ajuste de los PID con Blackbox, el remapeado de los recursos, el OSD , el control de VTX, el puerto softserial y la telemetría ESC.
iNav
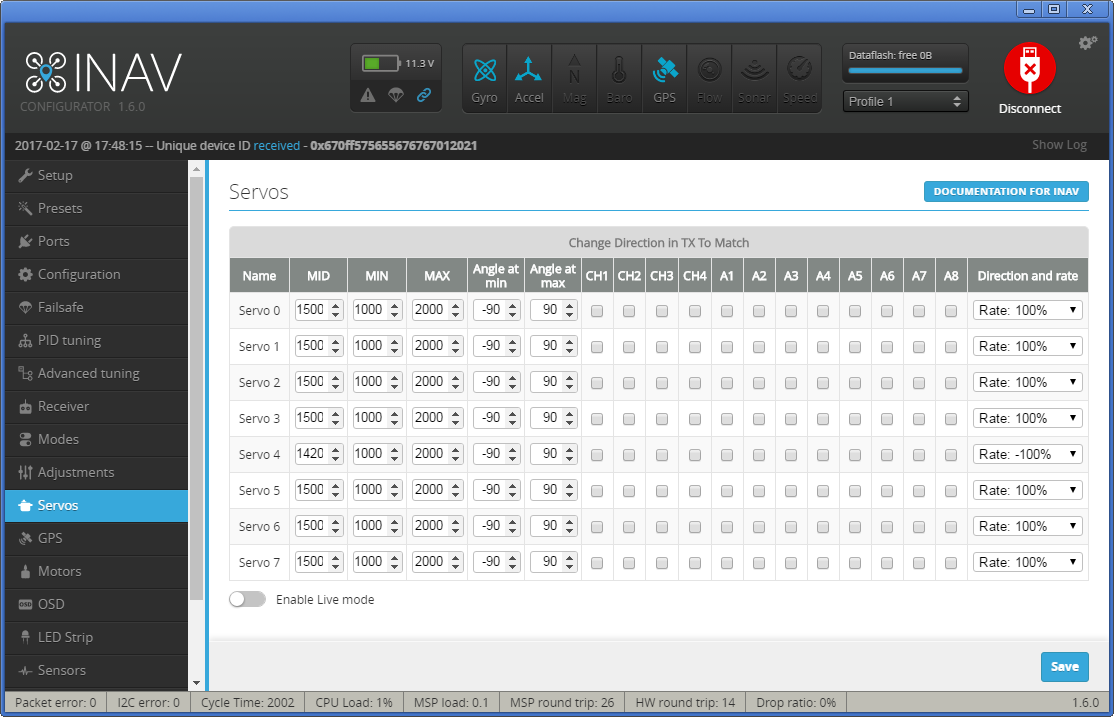
De código abierto. Gratuito. iNav, como su nombre indica está más orientado a la navegación y el vuelo autónomo, misiones del tipo volar siguiendo un mapa de coordenadas concreto y volver volver luego a casa, También se desgajó de Baseflight y es de código abierto, con buen soporte y actualizaciones regulares. Si tú eres el topógrafo que está interesado en este tipo de vuelo, sin duda esta es tu opción.
Raceflight
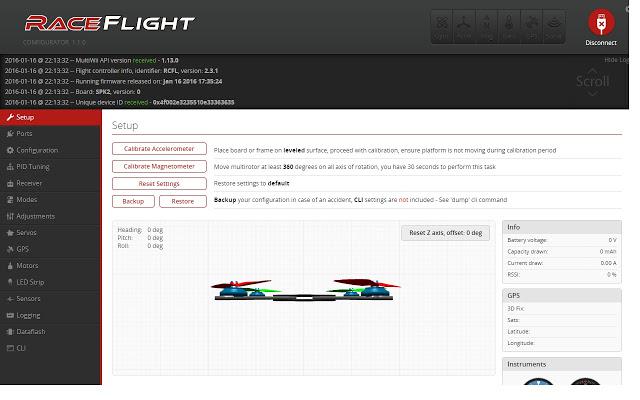
Originariamente desgajado de Betaflight / Cleanflight, Raceflight está enfocado en las carreras y el vuelo acrobático y orientado hacia los controladoras F4. Desde su creación, Raceflight pasó a ser de código cerrado, y sus desarrolladores afirman que hoy no queda en él nada del código abierto de la licencia general pública.
Raceflight es conocido por su suavidad de vuelo, pero tiene un soporte limitado. El interface es muy sencillo y es uno de los más fáciles de configurar para los principiantes.
KISS
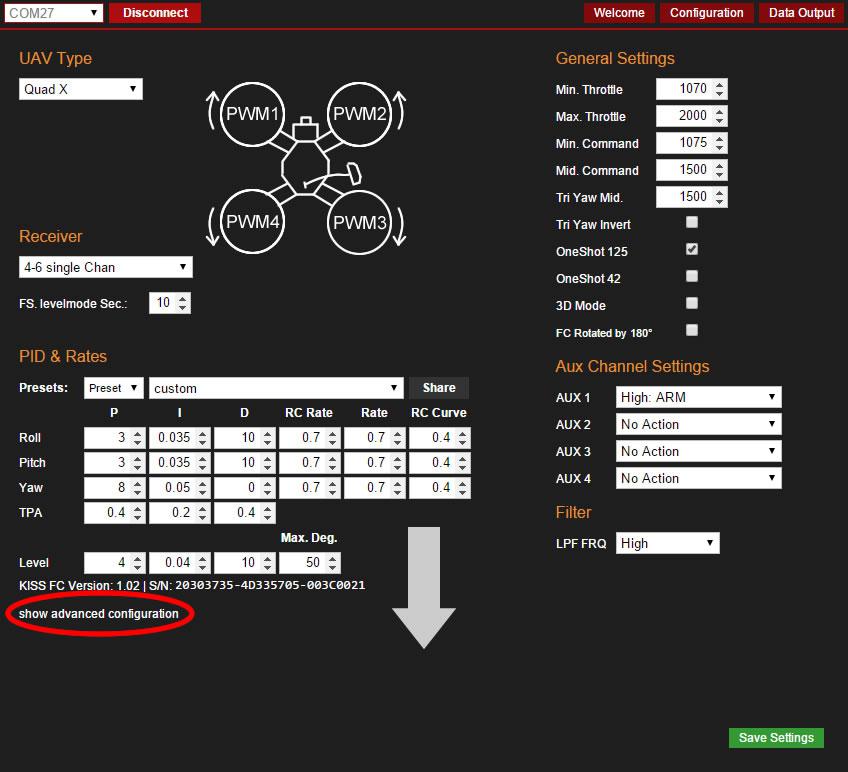
El concepto es Keep It Super Simple. KISS fue desarrollado por Flyduino, que lleva fabricando componentes para multirrotores desde el 2011 (el cretácico). El firmware es de código cerrado y depende mucho del hardware con el que interactúa (un poco como los productos de Apple). El material KISS y su software es muy usado y confiable, y se mantiene bastante bien a pesar de ser de código cerrado. El software de código abierto siempre se desarrolla mucho más rápido que el de código cerrado.
El GUI de KISS, es decir el interfaz gráfico de usuario, es mucho más simple comparado con los de Betaflight o Cleanflight, siendo una de las configuraciones más rápidas que hay para echar a volar enseguida, pero la falta de opciones hace que sea más difícil ajustar las configuraciones problemáticas
Con todo ello, el KISS es uno de los mejores firmware para controladoras de vuelo para carreras y vuelo acrobático que se puede encontrar. Muchos de los pilotos punteros vuelan y recomiendan productos KISS.
OpenPilot

Uno de los primeros firmware para FC de multirrotores de código abierto, precursor de muchas otras opciones. Fue discontinuado y reemplazado por LibrePilot en 2015, pero es otro firmware a mencionar por lo que ha sido de su código original.
LibrePilot
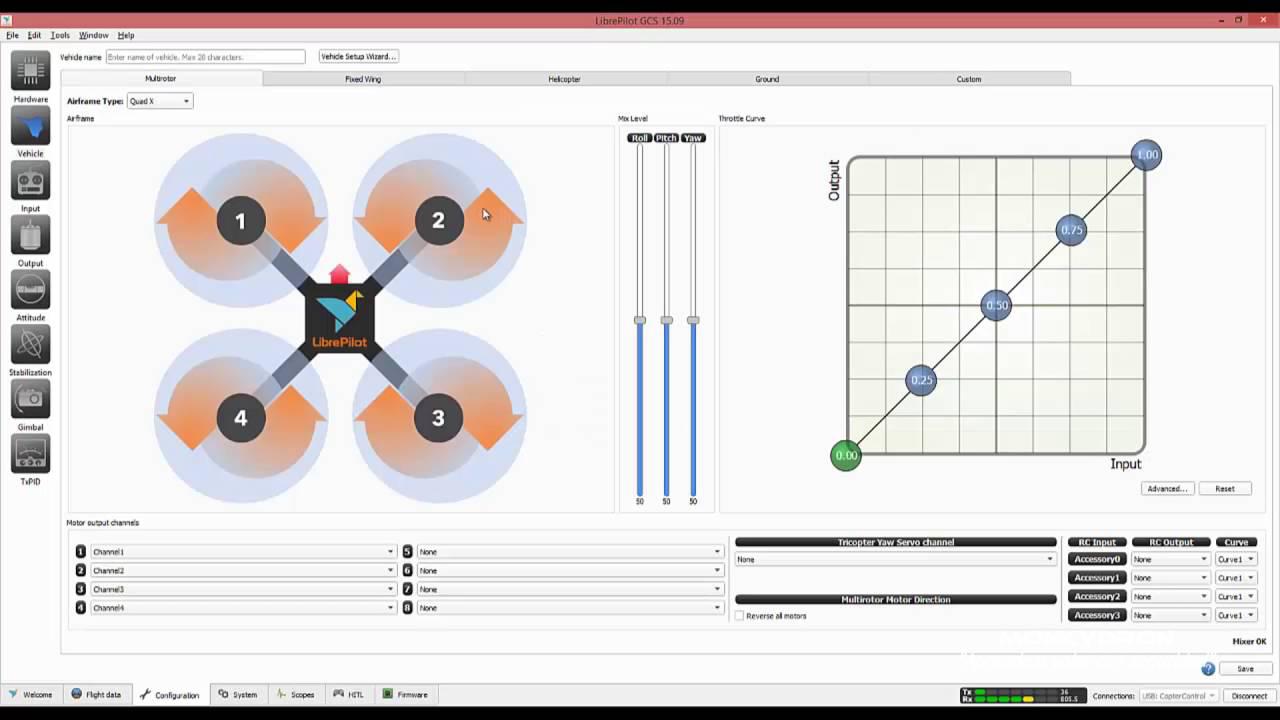
De código abierto. Gratuito. Originado en OpenPilot, está enfocado a la investigación y desarrollo para el uso en muchas, muchas aplicaciones diferentes, incluidas la robótica. Si has visto un vídeo de tres drones coordinados capturando y lanzando una pelotita, entonces te haces a la idea de las posibilidades de este firmware.
Aunque no es muy popular entre la comunidad de los mini quads y tampoco tiene el soporte para tantos FCs como los otros firmware de la lista, sigue siendo de código abierto y tiene una comunidad de desarrolladores consistente.
TauLabs
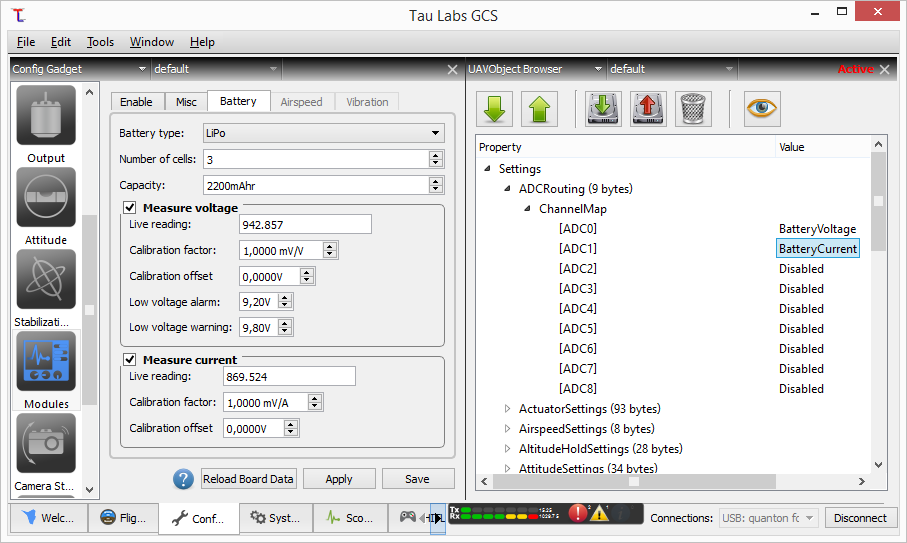
Tau labs es otra rama de OpenPilot enfocada en la investigación y desarrollo de los vehículos aéreos autónomos auto pilotados. Está orientado a profesionales, investigadores y estudiantes, Ofrece un nivel de entrada muy asequible, con un ajuste y configuración muy rápida para cualquiera que use vehículos autónomos. De nuevo, tiene un soporte limitado y menos seguidores que los mini quads, pero puede ser una plataforma excelente para hacer algo experimental, como de agricultura, calidad del aire, o cualquier otra carajada que se te pueda ocurrir.
dRonin
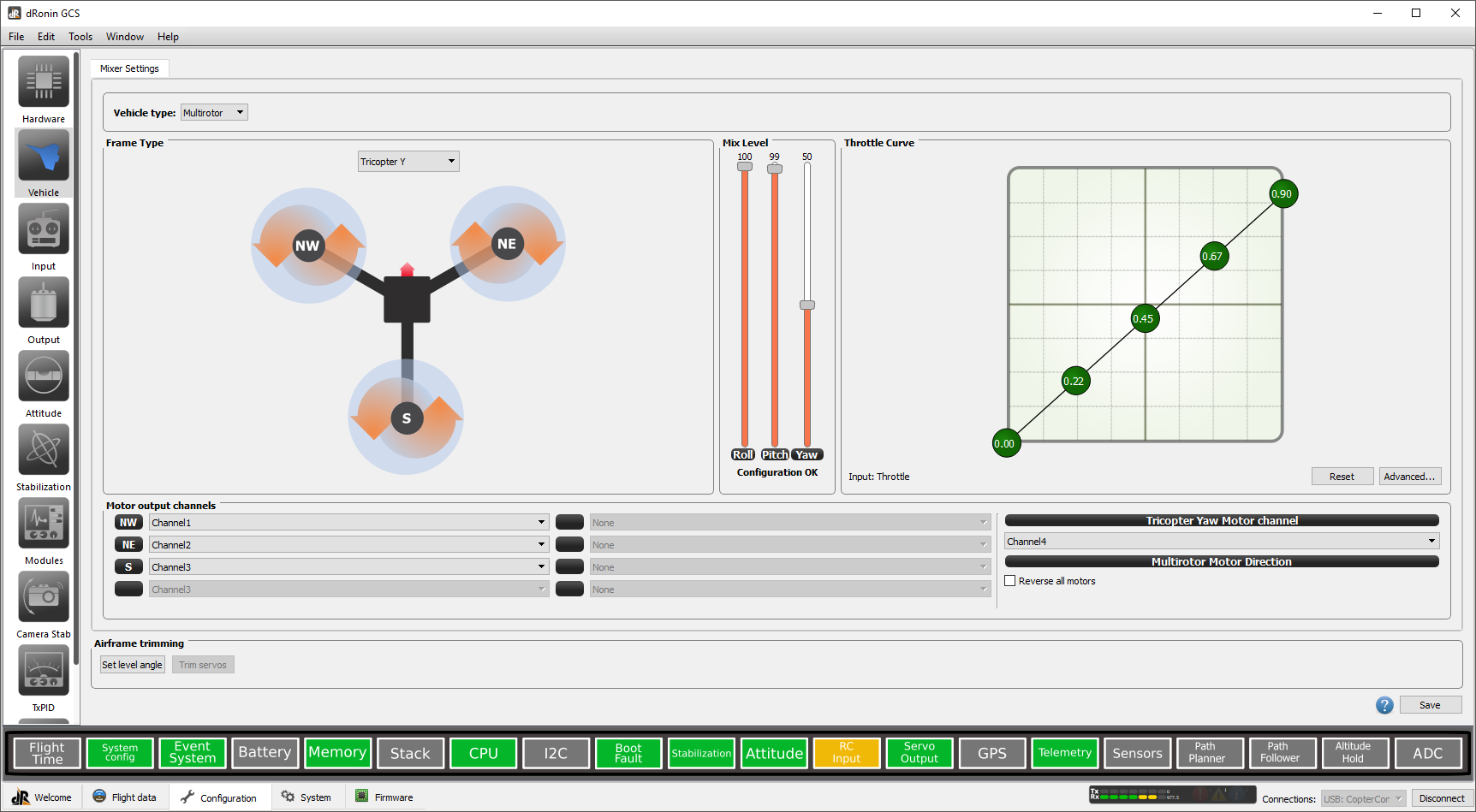
Por último, tenemos a Ronin, que es una especie de nieto de OpenPilot. Su nombre lo dice todo. Es de código abierto, con actualizaciones regulares y enfocado en mejorar el vuelo en carreras y acrobático. Tiene potencial. Han creado un modo de auto- tune que puede customizar el ajuste de los PID específicamente a tu construcción. Tiene un buen asistente a la instalación / configuración, pero la desventaja de que solo soporta unos pocos FCs.
Corolario
Como en muchas cosas relacionadas con este hobby, todo es relativo y conectado a una curva de aprendizaje. El firmware jugará un papel importante en lo que tu cuadracóptero será capaz de hacer, que funciones tendrá, y que controlador de vuelo deberá usar para sacarle el máximo partido. Tienes que saber que es lo que quieres hacer antes de elegir un Firmware.