Lo que hay que saber para elegir los motores para un cuadracóptero

Seguimos describiendo poco a poco todas y cada una de las partes de un dron. Hoy nos tocan los motores.
Cuanto sabes de motores eléctricos? Vives rodeado de ellos. Están en tu lavadora, en tu nevera. en tu lavaplatos, en tu ascensor, en tu ordenador, en el coche, en el aire acondicionado, en tu maquinilla de afeitar y en tu cepillo de dientes. Están prácticamente en todas partes. También en los drones. En un cuadracóptero hay, como es obvio, cuatro.
Probablemente sepas que los motores eléctricos se basan en las fuerzas magnéticas de atracción y repulsión generadas entre imanes permanentes y electroimanes, que de alguna forma ingeniosa consiguen hacer que la cosa gire. Puede que sepas también que el motor eléctrico fue una invención genial (otra más) de un tal Tesla, un tipo raro que había que dar de comer aparte, pero que era tan, tan, tan listo que nos dejó (a la humanidad) un legado que lo sitúan por méritos propios como uno de los seres humanos más trascendentes que han vivido. Producto de su genio es, por ejemplo, la corriente alterna. No, el coche eléctrico no lo inventó Nikola Tesla, y tampoco fue nunca socio de Elon Musk.
Los motores de los drones son motores eléctricos muy particulares. Todos ellos presentan las características comunes de ser ligeros y capaces de girar a altísimas revoluciones, pero como puedes imaginar, distintos drones requieren distintos motores, y la variedad que se puede encontrar es enorme.
En este post podrás aprender todo lo que siempre quisiste saber pero nunca te atreviste a preguntar sobre los motores de los drones, para que cuando alguien te diga que ha puesto 2205s de 2600 KV no tengas que poner cara como de que sabes de lo que está hablando porque efectivamente entiendes lo que está diciendo.
Este tutorial intenta ayudarte a entender las bases de los motores de los mini quads. Te debería ayudar a elegir la configuración de motores más efectiva para tu próxima construcción de un dron de carreras.
Nos vamos a centrar en los motores sin escobillas. Los motores con escobillas, propios de drones poco potentes y aparatos de calidad juguete, son más sencillos de entender: reciben corriente directa y su velocidad de giro es proporcional al voltaje al que son alimentados, y, obviamente, cuanto más grandes, son más potentes. Cómo de rápido giran, o cuanto par generan ya son temas de diseño y eficiencia. Un asunto que merece la pena mencionar es que este tipo de motores tiene un sentido de giro predeterminado, y debido a que hay piezas sometidas a desgaste (las escobillas), suelen tener un ciclo de vida corto.
Los motores sin escobillas, por el contrario, necesitan un tren de pulsos de corriente generado en sincronía para excitar sus bobinas de una forma concreta y hacerlos girar. Cómo puedes ver, son muy distintos. Sigue leyendo para saber más.
Indice de contenido
- Las bases – El peso de cuadracóptero y el empuje del motor
- Tamaño del motor
- KV
- N/P
- Tamaño del chasis – tamaño de las hélices – tamaño de los motores
- Cómo entender las especificaciones de un motor de un mini quad
- Factores básicos de comportamiento
- Factores avanzados de comportamiento
- Características de los motores de los mini quads
- Motores horarios y antihorarios
- Equilibrado de motores
- Recomendaciones
Estás buscando motores para un cuadracóptero? Por donde empezar?
Si eres nuevo en esto de los mini quads y el FPV, deberías entender la relación entre el empuje del motor y el peso de el quad. Esto es útil para fabricar multirrotores de cualquier tamaño. En cualquier caso, si simplemente estás construyendo un mini quad y no te apetece que te den la tabarra puedes ir directamente a la sección cómo decidir un tamaño de motor.
Tamaño del chasis
Lo primero de todo es que tienes que conocer el tamaño del chasis. Esto determinará que hélices y qué motores podrás utilizar en tu cuadracóptero.
Peso total del aparato
Puedes estimar cual es el peso total del aparato una vez hayas seleccionado todos los componentes. Deberías incluir todo lo que piensas incluir a bordo: al chasis, FC, PDB, RX, VTX, antena FPV, motores, hélices, ESCs, la batería, carga adicional como la GoPro, etc. Añade 10 o 20 gramos para compensar por los cables, el buzzer, las corbatas plásticas, etc. Probablemente no te acerques con gran precisión al peso real del aparato pero es mejor sobrestimar el peso y tener un poco de potencia extra que infravalorarlo y no ser capaz de volar.
Requerimientos de Empuje
Una vez sabes cuanto va a pesar el quad, y el tamaño del cuadro, ahora puedes calcular aproximadamente cuanto empuje necesitan generar la combinación de motores / hélices para hacer volar el aparato. Ya veo que vas a necesitar saber más de hélices. En breve tendrás un post con más información de este tema.
El ratio Empuje / Peso
Como regla general, el empuje generado debería ser como mínimo el doble del peso del quad. Éste es el mínimo absoluto para tener un dron que sea maniobrable mientras flota estático. Si el empuje proporcionado por los motores es demasiado pequeño, el quad no responderá bien a los controles y puede incluso llegar a tener dificultades para despegar.
 Por ejemplo, si tenemos un cuadracóptero que pesa 1 Kg, el empuje total generado por los motores al 100% debería ser como mínimo de 2 Kg, o 500 gramos por motor (para un cuadracóptero). Por supuesto que siempre es agradable tener algo más de lo que estrictamente necesitas…
Por ejemplo, si tenemos un cuadracóptero que pesa 1 Kg, el empuje total generado por los motores al 100% debería ser como mínimo de 2 Kg, o 500 gramos por motor (para un cuadracóptero). Por supuesto que siempre es agradable tener algo más de lo que estrictamente necesitas…
Para vuelos rápidos, como en las carreras de drones, los ratios de empuje / peso que se manejan son mucho mayores. No es raro ver drones con ratios de 8:1 o incluso de 10:1. Hablando en general, para vuelo acrobático se recomienda tener por lo menos 5:1.
Con un ratio Empuje / Peso elevado, el comportamiento del quad será ágil y dinámico, acelerando y cambiando de dirección de forma rápida. Un ratio demasiado elevado puede hacer que el quad sea muy difícil de controlar. Un pequeño toque del acelerador puede ser suficiente para poner tu dron en órbita como si fuese un cohete.
El bueno de Oscar Liang recomienda los siguientes ratios de acuerdo a la aplicación específica: Si lo que quieres es un dron para fotografía aérea (sin grandes velocidades), deberías apuntar a 3:1 ó 4:1. Esto no sólo te da mayor control sino que deja campo libre para posibles futuras cargas más pesadas (cámaras extra o baterías mas pesadas para tener más tiempo de vuelo). En cuanto a ratios para las carreras, el cielo es el límite. Vete a por tanta potencia como tu destreza te permita manejar.
El tamaño de los motores explicado
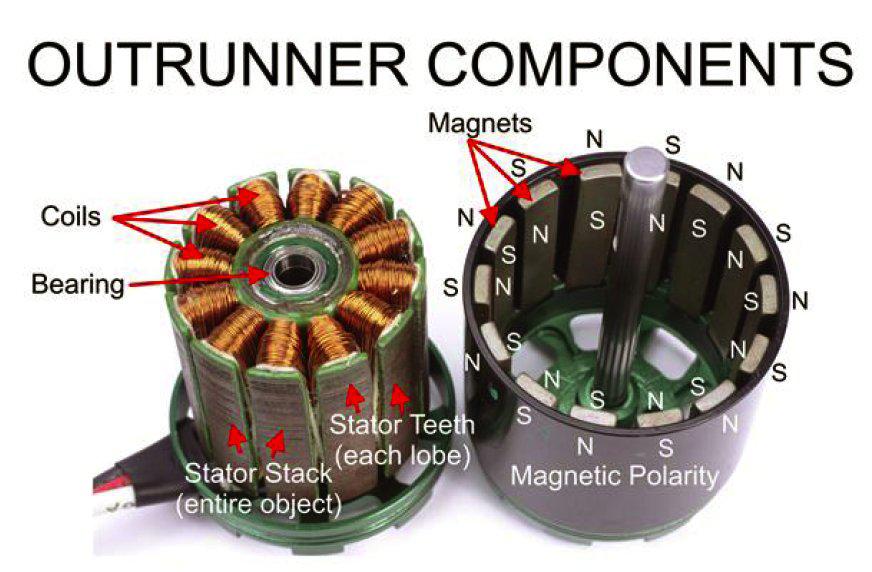
El tamaño de los motores sin escobillas está normalmente indicado con un número de 4 dígitos, AABB. Los dos primeros, AA, dicen el diámetro del estátor, mientras que BB dicen la altura del estátor, ambas en mm.
Pero que es un estátor en un motor sin escobillas? El estátor es la parte estacionaria del motor, o dicho en cristiano, lo que no se mueve, mientras que el rotor es lo que sí se mueve. El estátor tiene unos “polos” que son unos núcleos metálicos rodeados por bobinas de cobre. Los núcleos están compuestos por muchas láminas metálicas muy delgadas juntas con aislante entre ellas.
- Cuanto más alto el estátor, mas RPMs
- Cuanto mayor diámetro tiene el estátor, mayor par generado a menos RPMs
Incrementando el tamaño del motor, bien en altura o bien en diámetro se incrementan el tamaño de los imanes permanentes del rotor y también el tamaño de las bobinas del estátor. En cualquier caso, al incrementar la altura crece el tamaño de los imanes permanentes más que el tamaño de las bobinas, y al incrementar el diámetro crece el tamaño de las bobinas más que el de los imanes permanentes.
El tamaño de las hélices para las que un motor ha sido diseñado determinan el tamaño del eje. Los motores para hélices de 3”, 4”, 5” y 6” todos tienen ejes de 5 mm de diámetro. Los motores más modernos tienen el eje de la hélice integrado en la campana del motor, mientras que los motores más viejos puede que vayan con adaptadores separados.
KV . Constante de Velocidad
KV es la constante de velocidad. Comúnmente se traduce como “incremento de RPM por cada voltio”. Es un parámetro importante en un motor sin escobillas e indica el (teórico) incremento de RPMs del motor (sin ninguna carga, como una hélice) cuando el voltaje sube un voltio. Por ejemplo, dando potencia a un motor de 2300KV con una batería LiPo 3S (de 12.6 V), el motor girará a alrededor de 28980 RPM sin las hélices (2300 x 12.6 = 28980). Esto típicamente es el redondeo que hace el fabricante en sus especificaciones.
Una vez que se le monta la hélice al motor, las RPM caen drásticamente debido a la resistencia del aire. Los motores con KVs más elevados intentan girar la hélice más rápido, pero los motores con KVs más bajos suelen generar mayor par motor. Por esto es por lo que se suelen ver las hélices más grandes junto a motores con bajo KV porque hace falta más par para girar una hélice grande, y al revés: hélices pequeñas y ligeras con motores diseñados para altas velocidades.
El valor KV de un motor puede estar determinado por el número de vueltas de hilo de cobre que tienen las bobinas del estátor. En general, con muchas vueltas, el KV del motor baja, mientras que menos vueltas de hilo de cobre incrementan el KV del motor.
La fuerza magnética de los imanes también afectan el KV del motor. Los imanes potentes elevan el KV.
Si emparejamos motores con KV elevado y hélices demasiado grandes, el motor intentará girar rápido como lo haría si tuviera acoplada una hélice más pequeña, pero esto requiere más par motor. A medida que el motor intenta producir el par motor necesario extraerá más corriente y consecuentemente generará más calor, pudiendo ser éste demasiado y acabar quemando el motor. Cuando el motor se sobre calienta mucho, el recubrimiento de los cables se funde y se producen cortocircuitos.
Números N y P
Puede que hayas visto una especificación como 12N14P impresa en el motor. El número antes de la letra N indica el número de electro imanes y el número antes de la letra P quiere decir el número de imanes permanentes en el rotor.
La mayoría de los motores en RC tienen la misma configuración 12N14P. Algunos motores con KVs bajos pueden tener más electro imanes e imanes permanentes para ayudar a producir par de forma más eficiente, pero también son más caros de fabricar. Aunque es bueno saber todo esto, no es más que otra pieza de información que no es esencial a la hora de escoger los motores de un mini quad.
Cómo decidir un tamaño de motor?
Puedes averiguar que componentes has de usar en este orden:
Tamaño del chasis=> Tamaño de las hélices => Tamaño del motor
Conociendo el tamaño del chasis, podemos estimar que tamaño de motores debemos usar. El tamaño del chasis limita el tamaño de las hélices y cada hélice requiere diferentes RPM para generar el par eficientemente. Ahí es donde el KV del motor entra en juego.
Debes asegurarte también que los motores generan suficiente par motor para girar las hélices que has seleccionado, y ahí es donde el tamaño del estátor entra en juego. Generalmente, cuanto mayor es el tamaño del estátor y mayor es el KV, hace falta más corriente para girar el motor.
La tabla que sigue, compilada por Oscar Liang, es una guía general, no debes tomarla como si estuviese escrita en piedra. Hay mucha gente que utiliza motores con KV algo mayor o algo menor de lo sugerido en esta tabla. Se parte de la base de que estás alimentando los motores con baterías LiPo 4S, y el tamaño del cuadro se refiere a la distancia entre ejes de motores en diagonal.
| Tamaño del chasis | Tamaño de Hélices | Tamaño del Motor | KV |
|
150mm o menor |
3″ o menor |
1105 -1306 o menor |
3000KV o más |
|
180mm |
4″ |
1806 |
2600KV – 3000KV |
|
210mm |
5″ |
2204-2208, 2306 |
2300KV-2600KV |
|
250mm |
6″ |
2204-2208, 2306 |
2000KV-2300KV |
|
350mm |
7″ |
2208 |
1600KV |
|
450mm |
8″, 9″, 10″ o mayor |
2212 o mayor |
1000KV o menos |
En el cuadro se puede entender cómo es la tendencia y cual es la lógica que sigue. Cuanto mayor es el cuadracóptero, más grandes y pesadas serán las hélices. Los motores necesarios deberán por tanto ser capaces de proporcionar mucho par motor. Igualmente, cuanto menor es el aparato, menor será la capacidad de carga, por lo que la batería será más pequeña (1S ó 2S), esto implica menos voltaje y por lo tanto motores con mayor KV
Voltaje y consumo de corriente
Es importante entender que el voltaje tiene un gran impacto en la elección de motores y hélices. El motor tratará de girar más rápido si se le aplica un voltaje mayor, y por tanto extraerá más corriente de la batería. Debes ser consciente de la relación entre el empuje generado por tus motores y la corriente consumida. Cuando conoces la corriente consumida por tu combinación de motor / hélice puedes escoger los ESCs para tu dron.
Cómo leer (y entender) las especificaciones de un motor
Cuando seleccionas motores, normalmente vienen acompañados de un cuadro de especificaciones proporcionados por el fabricante o el distribuidor. Deberías poder encontrar información acerca de la potencia, el empuje, las RPM, etc.
 Este es un ejemplo de el motor Micro Brushless Outrunner (10g) 18-11 2000KV:
Este es un ejemplo de el motor Micro Brushless Outrunner (10g) 18-11 2000KV:
- Modelo – 1811-2000
- KV(rpm/V) – 2000
- Peso (g) – 10 (con los cables)
- Intensidad máxima (A) – 5.5
- Resistencia (m) – 0
- Voltaje máximo (V) – 7
- Potencia (W) – 0
- Eje A (mm) – 2
- Longitud B (mm) – 22
- Diámetro C (mm) – 18
- Longitud del eje D (mm) – 7
- Longitud Total E (mm) – 30
- Hélice sugerida – 7 x 5
- Corriente sin carga – 0,4 A
- Empuje – 130g a 5000 RPM
- Velocidad sin carga a 7.4 V – 15000 RPM
- Intensidad de máxima eficiencia – 5,5 A
Parámetros básicos de los motores en el comportamiento de un mini quad
Una vez que has elegido el tamaño del motor, probablemente tengas todavía un montón de opciones entre las que elegir. Para optar por el mejor motor para tu aplicación, deberías considerar los siguientes factores:
- Empuje máximo
- Corriente consumida
- Eficiencia
- Peso
Y ahora la decisión realmente depende de tus preferencias y en cómo quieres que tu dron se comporte.
Empuje y potencia
El empuje es probablemente lo que la mayoría de la gente mira cuando selecciona un juego de motores.
Un mayor empuje proporciona mayor aceleración, pero también debes ser consciente del consumo de corriente y de la eficiencia. No abuses de tus baterías con un combo motores/hélices hambriento de amperaje. Si tu dron necesita mucha corriente cuando pisas el acelerador, la descarga máxima de tus baterías debe ser capaz de seguir el ritmo, y también la batería debe tener suficiente capacidad para no descargarse demasiado rápido.
El empuje y la potencia son importantes, pero no son las únicas cifras a considerar.
El peso del motor
Una cosa que se suele obviar es el peso del motor, que es un aspecto muy importante, especialmente para las carreras y también para hacer acrobacias.
Puesto que los motores están montados en las cuatro esquinas del chasis, tienen una fuerte influencia en la respuesta del dron. Los motores más pesados incrementan el momento de inercia del conjunto, esto significa que los motores deben trabajar más duro para hacer girar el aparato.
En la práctica, cuando tu quad realiza rizos y toneles, le lleva tiempo adquirir la aceleración angular necesaria, moverse hasta la posición deseada y los motores más pesados hacen que el aparato necesite más tiempo para adquirir la velocidad angular necesaria, y también más tiempo para parar, por lo que se pueden percibir como si los motores tuvieran menos respuesta.
El motor en sí tiene su propio momento de inercia (el eje y la campana) puesto que funciona girando. Cuanto más pesado el motor, más par necesita para girar, por lo tanto necesita más tiempo para cambiar de RPMs. Esto afecta a la respuesta del motor y consecuentemente a las características del quad como conjunto. Este retraso al cambiar de RPMs hace que el quad se sienta menos preciso y que el controlador PID tenga que trabajar más duro.
Eficiencia de la potencia
La eficiencia del motor se suele calcular dividiendo el empuje (en gramos) por la potencia (en vatios) al 100% de acelerador. Se mide por tanto en g/W. Cuanto mayor este número, más eficiente es el motor.
Es importante mirar la eficiencia a lo largo de todo el rango del acelerador, no solamente cuando éste está a tope. Algunos motores pueden ser muy eficientes con poco acelerador pero perder eficiencia cuando pasa mas corriente por ellos a medida que se acercan a sus límites.
Con motores muy poco eficientes no solamente estás malgastando energía y tiempo de vuelo, tus baterías también sufrirán un desplome en el voltaje. El efecto se multiplica si estás usando baterías LiPo de poca calidad.
Recuerda que 1 Vatio (W) = 1 Voltio (V) x 1 Amperio (A)
Puesto que conocemos el voltaje de la batería que estamos usando, otra buena forma de mirar la eficiencias es usar el ratio Empuje / Corriente consumida (gramos/Amperio).
Generalmente, cuanto más empuje se genera, más corriente es necesaria para ello, así que los motores con un empuje alto y bajo consumo de corriente son los mejores. Los motores ineficientes bien generan poco empuje o bien consumen mucha corriente.
Otros parámetros de los motores para cuadracópteros
Muchas de las propiedades de los motores no son mencionadas por los fabricantes y sólo pueden ser averiguadas en bancos de ensayo.
- El par motor
- El tiempo de respuesta
- La temperatura
- Vibraciones
El par motor
El par motor es la fuerza que hace girar la hélice. Determina como de rápido puede el motor incrementar o disminuir su velocidad de giro, es decir, cómo de fácil le resulta al motor mover la masa del rotor, la hélice, y sobre todo, el aire.
El par motor afecta enormemente el comportamiento de tu quad en vuelo, en concreto a su respuesta. Un par motor elevado proporciona al quad una respuesta mejor por el rápido cambio en las RPM de las hélices.
Un par mayor también significa que puede utilizar hélices más pesadas (con el coste de un consumo mayor). Si un motor con un par bajo es acoplado a una hélice demasiado pesada, el motor será incapaz de producir suficiente fuerza como para girar la hélice a las RPM deseadas, resultando en una eficiencia baja y sobrecalentamiento.
Un inconveniente de los motores con mucho par es la oscilación. Los motores con mucho par son capaces de cambiar sus RPM tan rápido que puede realmente amplificar el error en el PID causando oscilaciones que pueden ser difíciles de eliminar incluso ajustando los PID, especialmente en el eje de cabeceo.
Tiempo de Respuesta
El tiempo de respuesta del motor también depende del par motor. Los motores con más par motor a menudo tienen un tiempo de respuesta más rápido. Una forma fácil de medir el tiempo de respuesta de un motor es ver cuanto tiempo les lleva ir de cero a máxima velocidad.
El tiempo de respuesta está afectado por el peso y el ángulo de las palas de la hélice escogida, su “agresividad”. Las condiciones atmosféricas también tienen su importancia. A baja altitud, por ejemplo, el aire es más denso. Esto significa que las palas de la hélice en su giro deben mover un número mayor de moléculas de aire. A una altitud elevada, las hélices girarán más rápido puesto que tienen que interaccionar con menos moléculas.
Temperatura
La temperatura afecta a los motores sin escobillas porque los imanes permanentes utilizados en ellos tienen un campo magnético más débil a medida que aumenta la temperatura. También se desmagnetizan antes cuando están afectados de altas temperaturas, lo que afecta a su vida útil.
Instalar hélices demasiado grandes (over-propping) y usar el acelerador a tope excesivamente provocará que tus motores funcionen demasiado calientes. Esto con el tiempo dañará el comportamiento de los imanes y de los motores. Por este motivo, los motores suelen tener diseños que ayuden al enfriamiento porque esto supone una vida más larga para ellos. Esto es por supuesto si ni lo destruyes antes en un choque.
Vibraciones
Las vibraciones causadas por los motores pueden tener una serie de consecuencias desagradables para el comportamiento de tu quad.
Si un motor tiene un mal equilibrio o es de construcción de calidad muy pobre, podrías experimentar una vibración que afecte a tu controlador PID. Como la frecuencia de la vibración cambia a diferentes niveles de acelerador, puede suceder que el quad sea muy difícil de ajustar. Un motor que sufre de vibraciones también produce mucho más ruido eléctrico que uno que funcione con suavidad. Este ruido eléctrico puede afectar a tus giroscopios haciendo que el comportamiento de vuelo sea aún peor. También la imagen de tu monitor FPV se degradará si la alimentas con la misma batería que los motores y los ESCs.
Hay gente que monta satisfactoriamente los motores sobre soportes amortiguados para reducir las vibraciones, y los resultados pueden ser muy buenos. Los motores que han resultados dañados en choques, los ejes torcidos o las hélices no equilibradas también pueden producir vibraciones problemáticas
Algunas características de los motores de mini quads
Los motores para drones son motores eléctricos, de acuerdo, pero han sido diseñados para una aplicación tan específica que tienen algunas características muy particulares. Hay tantas variables que afectan el comportamiento de un motor que todo puede llegar a ser muy controvertido y complicado. Por ejemplo, motores con el mismo tamaño de estátor y KV pueden tener empujes muy distintos, y también puede ser distinto su consumo y su tiempo de respuesta, incluso usando la misma hélice. Las diferencias en el diseño y en los materiales tienen gran impacto en el comportamiento.
Explicaremos unas pocas características en el diseño de los motores que contribuyen a un rendimiento mayor o menor.
-
Ejes huecos
Un eje hueco ahorra peso lo que permite al fabricante usar materiales más resistentes y más pesados y por tanto mejorar la durabilidad, pero taladrar un agujero atravesando el eje evidentemente incrementa el coste de fabricación.
-
Los diferentes tipos de imanes
Los imanes usados en los motores sin escobillas de los cuadracópteros están caracterizados de acuerdo a la fuerza de su campo magnético, por ejemplo N52, N54, etc.
Cuanto más alto el número, más fuerte es el campo magnético. Un campo magnético más fuerte es teóricamente capaz de generar potencia más efectivamente, proporcionando más par motor y un tiempo de respuesta más  rápido.
rápido.
- Grosor de las láminas del estátor
Resumiendo: cuanto más delgadas sean la láminas, mejor. La laminación ayuda a reducir las llamadas corrientes de Foucault o de torbellino, que generan calor en un ambiente con un campo magnético variable. Láminas más delgadas significa que se gasta menos energía generando las corrientes de torbellino y calentando las láminas, así que los motores son más eficientes.
- El Gap o hueco entre el rotor y el estátor
Las fuerzas magnéticas se degradan con el cuadrado de la distancia, así que reducir el hueco entre los imanes permanentes del rotor y las bobinas del estátor dispara significativamente la potencia del motor.
Un hueco más pequeño no sólo hace que el motor sea más potente, sino que también mejora el par motor y la respuesta. El inconveniente de reducir el hueco es que se incrementa el consumo de corriente y disminuye la eficiencia.
- La forma de los imanes. Forma en arco
Usar imanes permanentes en forma de arco (imanes curvos) es una técnica para acercarlos aún más al estátor, produciendo un hueco (gap) más pequeño y regular.
De hecho, por la forma en la que funcionan los campos magnéticos, con un imán curvo, el punto en el que se encuentra el campo más fuerte no está en la superficie del imán sino en un punto situado a cierta distancia de ella. Esto quiere decir que con los imanes permanentes curvos, los campos magnéticos de éstos y de los electro imanes se acercan todavía más.
Además de la forma de los imanes permanentes, algunos fabricantes prueban sus motores con distintos grosores de imanes permanentes, encontrándose a menudo que un imán más delgado (y por tanto con campo magnético más débil) proporciona paradójicamente mejores resultados.
- Las vueltas de hilo de cobre en las bobinas del estátor y el grosor del hilo de cobre
El número de vueltas de hilo de cobre en cada bobina del estátor determina la máxima corriente que el motor es capaz de consumir, mientras que el grosor del hilo determina cuanta de esta corriente puede el motor manejar entes de recalentarse.
Menos vueltas = menos resistencia = KV más alto
La desventaja es que esto implica un campo magnético reducido en el estátor y por lo tanto poco par motor.
Lo contrario ocurre cuando se incrementan el número de vueltas de hilo de cobre. Este incremento produce un campo eléctrico más fuerte en la bobina del estátor y genera más par, pero debido a que los hilos de cobre son más largos también se genera más resistencia y el KV del motor disminuye.
Para tantear este asunto, los fabricantes juegan con el grosor del hilo de cobre. Al aumentar el grosor del hilo de cobre, la resistencia efectivamente disminuye, y la potencia del motor aumenta sin sacrificar par ni eficiencia. Con un hilo más grueso, el motor también puede manejar más corriente sin correr el riesgo de quemarse.
Pero todo ello tiene un precio, el peso. El bobinado también exige más espacio físico y requiere un estátor más grande. Por este motivo cada vez se ven motores más grandes y pesados, pero al mismo tiempo, más potentes.
- C-Clip / E-Clip / Tornillo en el eje

Para mantener la campana del motor en su sitio, los fabricantes usan uno de estos tres sistemas que impiden que el eje de desplace axialmente respecto de la base del motor y se salga: El C-Clip, el E clip o un tornillo de fijación.
Cada uno de estos sistemas tienen sus pros y sus contras y es difícil definir cual es mejor, Hablando en general, los tornillos son más cómodos para el mantenimiento, pero sufren el riesgo de ser sobre-apretados acabar dificultando el giro del eje.
En cuanto a los C clip y los E clip, si no están bien instalados, (y muchos juran después de ver a su dron estrellarse que incluso estando bien instalados) corren el riesgo de salirse en pleno vuelo, lo que provoca que la campana del motor y la hélice salgan volando. Los tornillos tampoco son inmunes a este problema si no están bien apretados (mucho es malo y poco también…).
- Culo cerrado o culo abierto?
No. No es una broma. Pero con el culo nos referimos a el fondo del motor, el lado del estátor, el lado contrario a donde está la hélice, vaya. Aunque fabricar un dron tenga algunas tareas como la soldadura o la confección de un chasis que son casi artesanales, no tiene nada que ver con las artes anales 🙂
En el diseño de las bases de los motores, hay quien adopta una aproximación más tradicional dotando al motor de una carcasa (el culo cerrado) y hay quien deja el estátor desnudo (el culo abierto).Ambos diseños tienen pros y contras.
Los motores con el culo cerrado tiene una base más fuerte pero los motores con el culo abierto con más ligeros. Los cerrados tienen menos probabilidad de acabar sucios con tierra en caso de accidente, pero en contra está el argumento de que los abiertos se calientan menos y son mucho más fáciles de limpiar.


En los motores de culo abierto puedes ver claramente cuanto entran los tornillos, y tienes menos probabilidades de dañar el motor si los tornillos son demasiado largos (esto es común que les pase a los principiantes cuando utilizan motores con el culo cerrado) otro lado los motores con el culo cerrado suelen maltratar menos su cableado en caso de choque, y recuerda que vas a chocar inevitablemente.
Otras cuestiones
Los fabricantes de motores experimentan continuamente con nuevos diseños y niveles de integración con el hardware, y ello ha llevado a avances en el enfriamiento e incluso a motores con las ESC integradas.
Los puntos de soldadura en el motor pueden ser útiles. Te permiten usar cable más ligero y ahorrar peso. Además permiten una reparación más sencilla en caso de que los contactos se arranquen en caso de accidente, lo que suele significar el final de un motor de diseño típico.
- Motores horarios y antihorarios
Algunas veces encontrarás que los motores están etiquetados como horarios (CW o clockwise) y antihorarios (CCW o counterclockwise).
Mientras que esto es importante para los motores con escobillas porque éstas se desgastan mucho más rápido cuando giran en sentido equivocado, los motores sin escobillas no tienen este problema. Los motores sin escobillas CW y CCW son esencialmente idénticos. La única diferencia es que el eje del motor está roscado en un sentido u otro. La idea es que al girar los motores, todas las hélices produzcan siempre un par de apriete sobre las tuercas que las sujetan en su sitio, sea cual sea el sentido de giro del motor.
Para saber si un motor tiene la rosca con el sentido adecuado, simplemente sujeta la tuerca con los dedos en el eje y haz girar el motor en el sentido en el que debería girar cuando esté funcionando. Si la tuerca se aprieta entonces todo está bien.
Hay quien prefiere simplemente usar la misma rosca en todos los motores para no liarse con diferentes tuercas de hélices que pueden ser difíciles de encontrar si es una “rosca a izquierdas”
- Equilibrando el motor.
Cuando recibes unos motores nuevos, lo primero que debes hacer es equilibrarlos. Aunque no siempre es necesario hacerlo, es una buena práctica, especialmente para los motores grandes (2212 o más).
El equilibrado suele ser innecesario para los motores de alta gama porque su calidad suele ser suficientemente buena, pero con opciones más baratas no te debería extrañar si no se ha prestado tanta atención en el control de calidad.
Puesto que los motores que se utilizan en drones de carreras no suelen ser tan grandes, no me voy a poner a detallar el procedimiento de equilibrado. Si tú estás interesado en drones más grandes como plataformas de fotografía aérea, etc., mi recomendación sería simplemente que compres motores de buena calidad, y no tendrás necesidad de equilibrarlos. En cualquier caso, si vas a poner en el aire tu cámara Nikon de 800 €, lo último que quieres es que acabe en el suelo destrozada por ahorrarte 10 € comprando un motor casposo.