Objetivos
Material requerido.
 |
Arduino UNO |
 |
Soporte pan & tilt |
 |
Diodo Laser |
 |
2 x Servo SG90 |
 |
cables de Protoboard |
INTRODUCCIÓN Y MONTAJE
Sí seguís este curso con regularidad, esta sesión no va a tener mucho misterios para vosotros, porque no vamos a explicar nada que no sepamos. Y si no lo habéis hecho (o las tenéis un poco olvidadas) os recomendamos que echéis un ojo a estas sesiones, en las que hablábamos de los joysticks, los servos y, por supuesto, de cómo montar el soporte del brazo robótico de dos ejes:
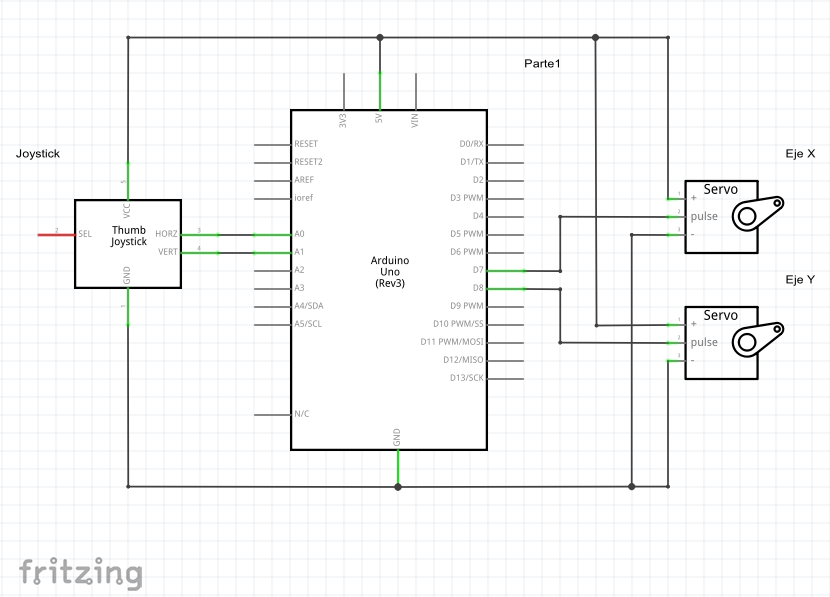
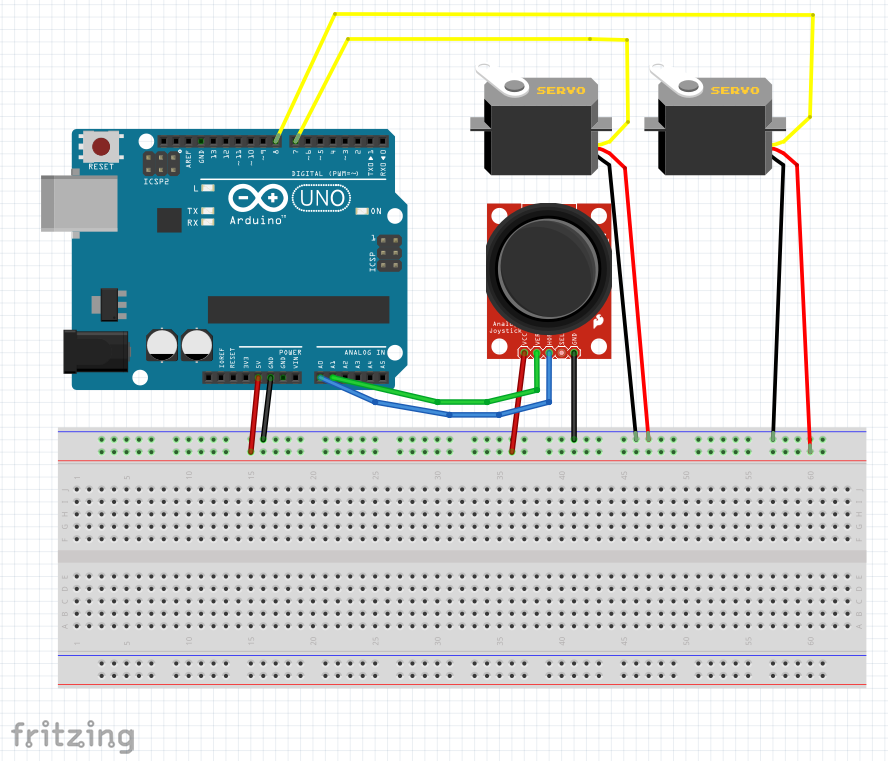
Si ya habéis montado la estructura sabréis que para poder mover el brazo robótico vamos a utilizar dos servos. Uno se encargará del movimiento en el eje X (horizontal) y el otro en el eje Y (vertical). Y para controlar ese movimiento utilizaremos un joytick, que nos viene al pelo, porque precisamente nos permite controlar dos ejes.
El esquema de conexión sería el siguiente:
PROGRAMA DE CONTROL
El programa para controlarlo es muy sencillito. Simplemente crearemos dos variables en las que guardaremos la posición del servo, «angulo X» y «angulo Y», que inicialmente posicionaremos en 90º, la posición media de los servos.
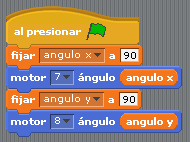
Y para moverlos sumaremos o restaremos un número de grados a la posición del servo cuando el joystick se encuentre desplazado de la posición central en alguno de los ejes, teniendo en cuenta si es el eje X o el Y (no quiero ser pesado, pero si necesitáis más explicaciones recordad que podéis echar un ojo a las sesiones que hemos comentado antes).
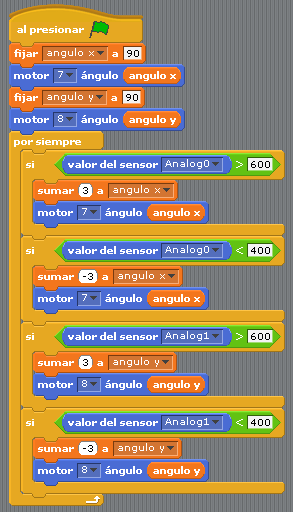
Para cambiar la velocidad de movimiento de los servos sólo tendríamos que cambiar la cantidad que sumamos y restamos a los ángulos. Aquí tenéis el programa completo: brazo-robot-s4a.
RESUMEN DE LA SESIÓN
En esta sesión hemos aprendido varias cosas importantes: