Objetivos
Material requerido.
 |
Arduino UNO |
 |
Soporte pan & tilt |
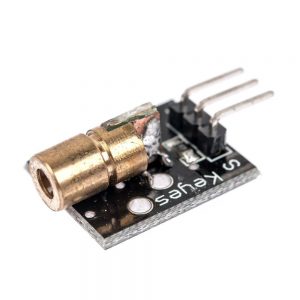 |
Diodo Laser |
 |
2 x Servo SG90 |
 |
cables de Protoboard |
CÓMO MONTAR EL BRAZO ROBÓTICO
1º Montaje de la base: Colocamos el horn (la pieza de plástico que se coloca en el servo) de 4 brazos en la base del brazo robótico. Los brazos son de longitudes diferentes, así que nos tendremos que fijar que los agujeros de la hélice coincidan con los de la base. Atornillamos ambos componentes desde la parte de abajo de la base, utilizando los 4 tornillos más pequeños.


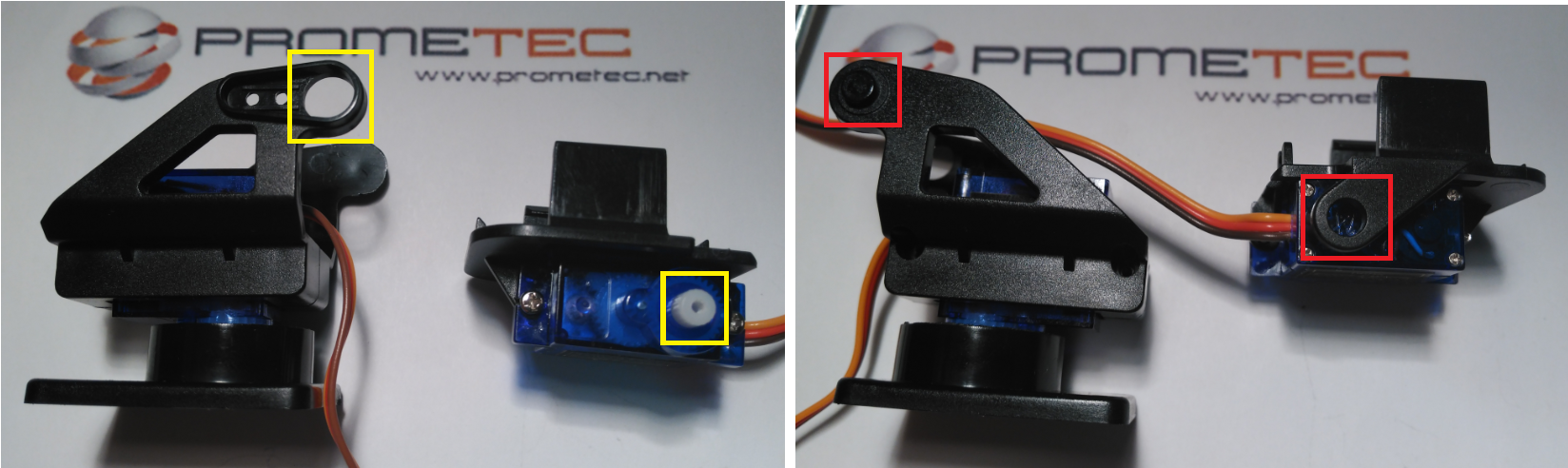
2º Montaje primera articulación: necesitamos un servo y las dos piezas de plástico que se ven en la imagen. Tenemos que encajarlas de forma que las partes planas que sobresalen del servo enganchen en las hendiduras de las partes de plástico (recuadradas en color rojo).

Tenemos que engancharlo de forma los cables salgan por la parte que es más alta de las piezas de plástico, y que la parte rotativa del servo quede hacia la parte plana de dichas piezas. O sea, fijándonos en la imagen de arriba a la derecha, colocar tal cual el servo sobre os enganches de la pieza de la derecha y cerrarla por encima con la otra. Debería quedarnos así:

3º Unir la base y la primera articulación: cogemos las dos partes que hemos unido y un tornillo corto de los de punta plana.

Se trata de introducir la parte blanca que rota del servo en el agujero de la hélice que hemos atornillado a la base. Entonces metemos el tornillo desde la parte de abajo de la base, atornillándolo al servo.

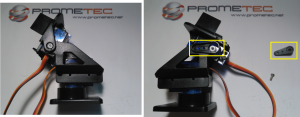
4º Montaje segunda articulación: necesitamos la pieza de plástico que nos queda, un servo y los dos tornillos largos de punta plana.

Tenemos que colocar el servo de forma que la parte blanca que rota quede justo al lado contrario que el agujero redondo que hay en la parte más alta de la pieza de plástico. Utilizamos los tornillos para unir el servo a la pieza.

5º Unir las dos partes: para enganchar las dos partes que hemos montado tenemos que meter la parte blanca que rota del servo en el agujero de la primera articulación (amarillo), y enganchar la parte que tiene un agujero de la segunda articulación en la parte circular que sobresale en la primera (rojo). Tendréis que forzarlo un poco para que entre.
Y ahora sólo nos queda encajar la segunda hélice del servo en su respectivo agujero y unirlo usando un tornillo como hicimos con el otro servo.
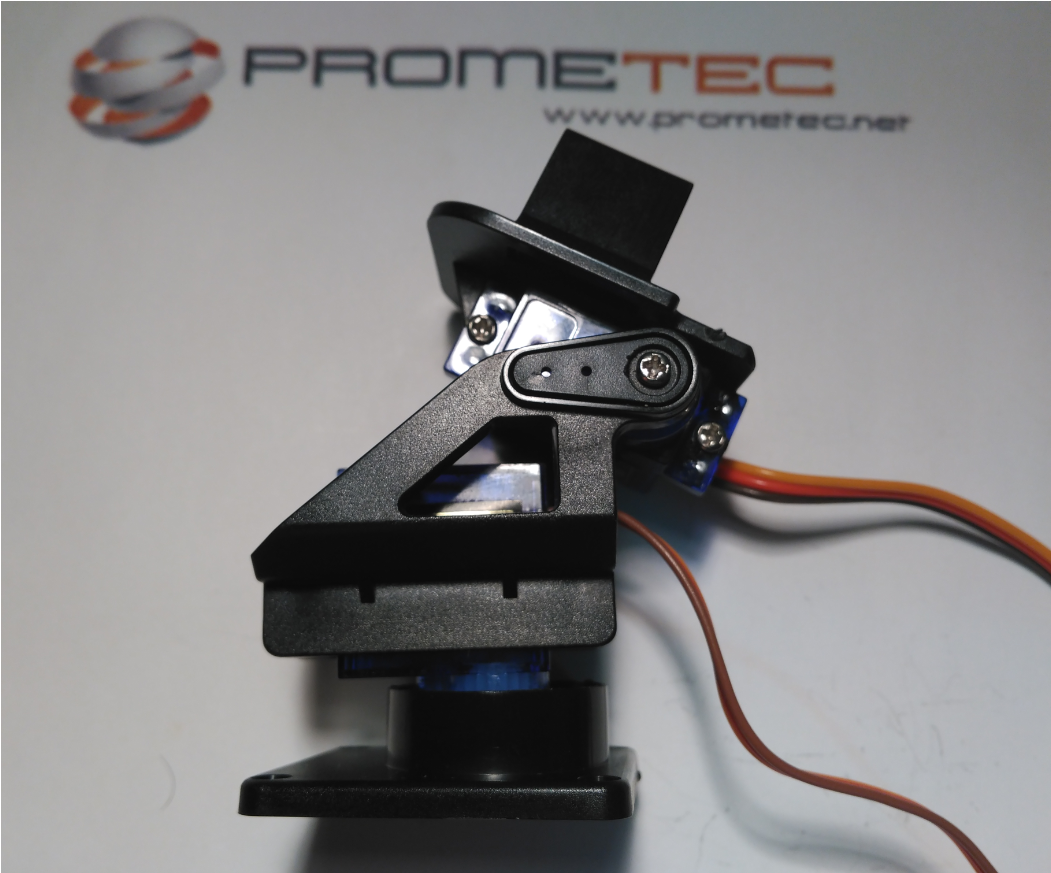
Y con esto ya tenemos montado el brazo robótico. Nos debería quedar tal que así: