Objetivos
Material requerido.
 |
Kit inicio UNO |
 |
Kit Inicio Mega |
Que es un servo
.
Normalmente los motores habituales lo que hacen es transformar la energía eléctrica (O química) en un giro continuo que podemos usar para desarrollar trabajo mecánico.
En la sesión 13 utilizamos un pequeño motor de corriente continua y regulamos la velocidad de giro mediante una señal PWM de Arduino uno.
Los servos son también motores de corriente continua, pero en lugar de diseñarse para obtener un giro continuo que podamos aprovechar (para mover una rueda por ejemplo), se diseñan para que se muevan un angulo fijo en respuesta a una señal de control, y se mantengan fijos en esa posición.
Imaginad por ejemplo un timón de un avión o barco. No queremos un giro continuo, sino un motor al que le pueda indicar el ángulo que deseamos en grados y que mantenga esa orientación hasta que le demos una orden en contrario.
Estos servos o servomotores son muy frecuentes en Aero modelismo y en robótica, por la capacidad que presentan para moverse a un ángulo concreto y mantenerse allí. De hecho se suelen diseñar para que giren un ángulo proporcional a una señal PWM, de forma que su control es muy preciso. Un servo suele estar formado por:
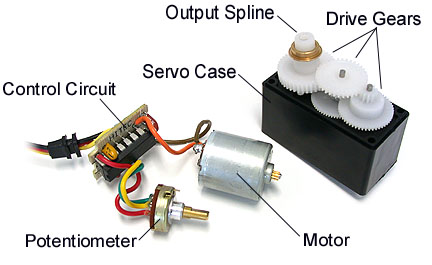
Un servo suele estar formado por:
En la práctica se comporta como un bloque funcional que posiciona su eje en un ángulo preciso en función de la señal de control
Habitualmente los servos tiene un margen de operación, es decir, pueden moverse entre 0º y ángulo dado, que suele ser de 180º, pero existen modelos comerciales de todas la características imaginables (incluyendo servos de 360º).
Normalmente estos pequeños servos funcionan sobre 5V y el control se realiza mediante una señal de control PWM, en la que el ancho el pulso indica el ángulo que deseamos adopte el eje.
Un servo tiene un conector de 3 hilos, 5V (rojo), GND (negro o marrón) y el otro Control (amarillo o blanco).
Podríamos escribir un pequeño programa en Arduino que controle estos pulsos y los relacione con el ángulo buscado, pero antes de que nadie se asuste, los servos (y otras cosas) son tan habituales, que ya ha habido gente que han escrito estos programas y los han puesto a nuestra disposición.
De este modo podemos manejar un servo sin preocuparnos para nada de cómo realizar el control de las señales, o de la operación interna, basta con instalar estos programas en una forma especial llamada librería.
La ventaja de trabajar con una plataforma tan bien establecida como Arduino, es que hay cantidad de gente en el mundo desarrollando librerías, casi para cualquier cosa que podáis imaginar.
Y aún hay algo mejor: Son gratis.
Veréis que en las próximas sesiones vamos a utilizar librerías para cantidad de cosas, pero hoy vamos a comenzar con la primera, la librería servo.
Usando nuestra primera librería: Servo
.
Servo es una librería estándar en Arduino. Eso quiere decir que viene incluida cuando instaláis el IDE, a diferencia de otras librerías que debemos buscar, descargar de Internet e instalar para poder usarlas.
Para usar una librería estándar, basta con pedirle al IDE que la incluya en nuestro programa. Id al menú Programa \ Importar Librería y os saldrá un desplegable con todas las librerías que tenéis instaladas en el IDE.
Por ahora solo nos interesa la librería Servo. Pinchad en ella. Arduino incluirá una línea al principio de vuestro programa como esta:
#include <Servo.h>
A partir de ahora ya podemos utilizar las funciones disponibles en la librería.
Vamos a montar un circuito en el que hagamos moverse al servo de forma controlada, e iremos viendo las instrucciones necesarias.
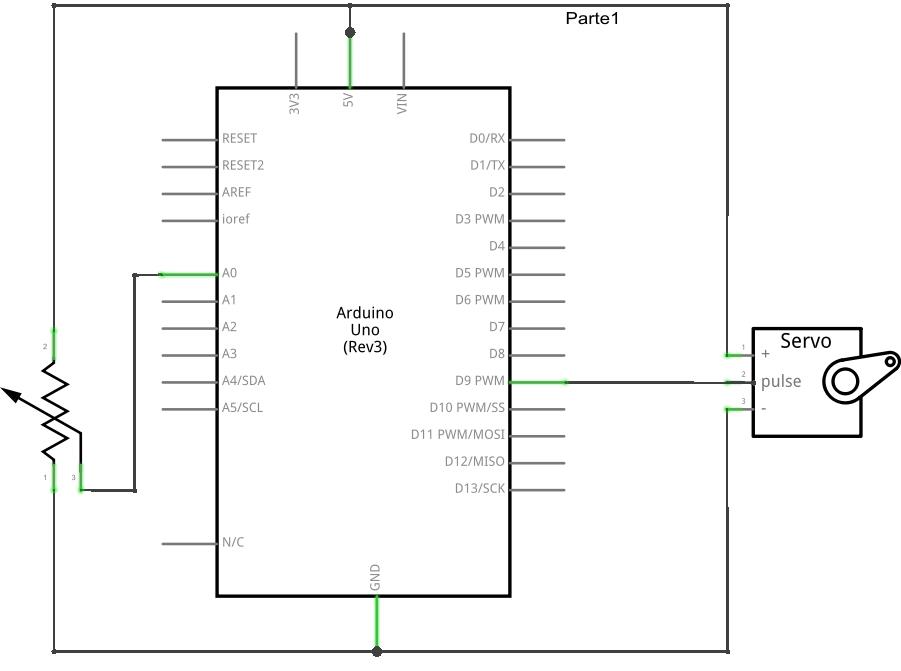
Esquema electrónico del circuito
.
Vamos a conectar el servo primero a GND y 5V y luego el pin de control, a un pin de Arduino que permita PWM (Recordad esto o de lo contrario os costara ver el problema). Recordad que es el ancho el pulso lo que controla el ángulo.
Vamos también a conectar un potenciómetro a la puerta A0 para jugar con el servo.
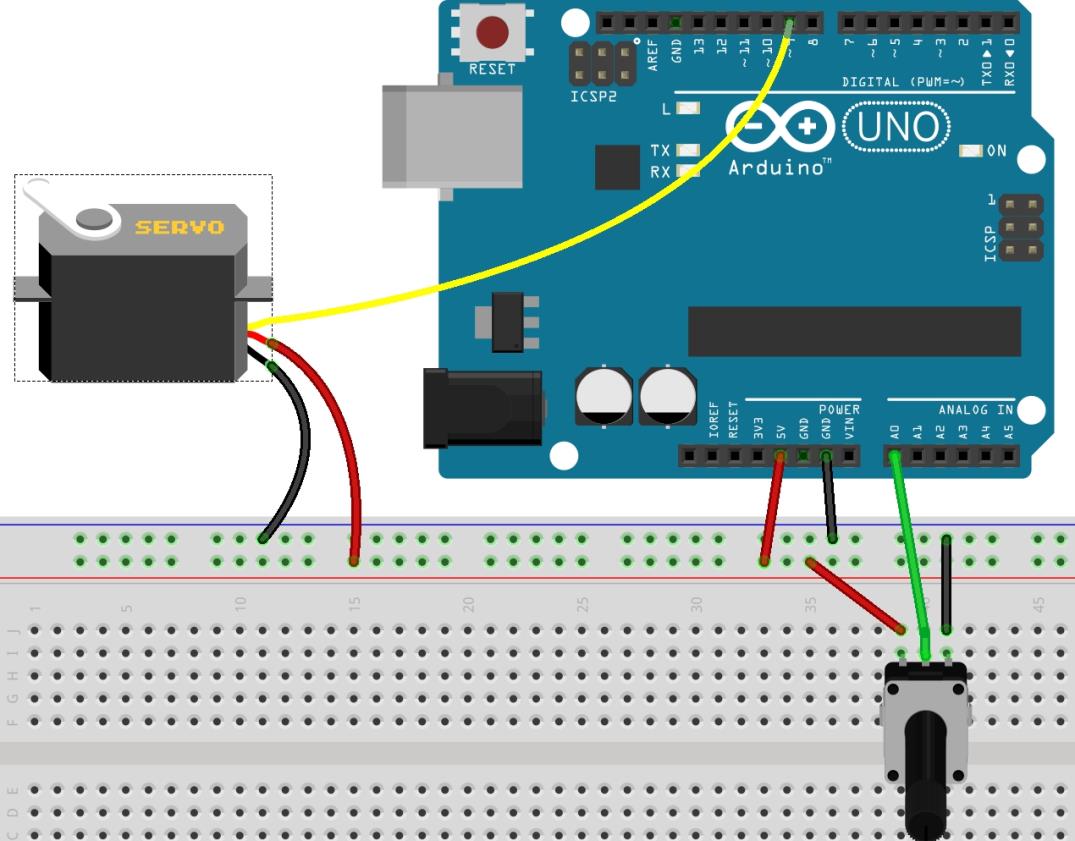
El diagrama de conexión para la protoboard es igual de sencillo:
El Programa de control
Vamos a empezar con una línea que ya conocíamos el include y otra nueva:
#include <Servo.h> Servo servo1;
Para poder utilizar la librería debemos crear, lo que se conoce como un objeto tipo Servo que llamamos servo1.
C++ es un lenguaje orientado a objetos, esto significa que podemos definir objetos tipo (como servos) sin más que declarar un nuevo objeto del tipo que deseamos. En la jerga de la programación se llama crear una instancia, o instanciar un nuevo objeto.
Así, esa segunda línea significa que vamos a crear una nueva instancia de tipo Servo que llamamos servo1.
Una vez creada la instancia del objeto (y podemos crear tantas como necesitemos, para manejar varios servos a la vez) tenemos que incluir una línea en la función setup() para informar a C++ que vamos a conectar ese objeto abstracto que todavía es servo1 a un pin físico del Arduino para controlarlo. En nuestro caso el pin 9:
servo1.attach(9);
Una vez cumplido el trámite para gobernar la posición del servo recurrimos a
servo1.write( angulo);
Donde Angulo es el valor en grados de la posición que deseamos. Fácil ¿No?
Vamos a escribir un programa que vaya barriendo un Angulo en grados y moviendo el servo a esa posición.
#include <Servo.h> // Incluir la librería Servo
Servo servo1; // Crear un objeto tipo Servo llamado servo1
int angulo = 0 ;
void setup()
{ servo1.attach(9) ; // Conectar servo1 al pin 9
}
void loop()
{ for(angulo = 0; angulo <= 180; angulo += 1) //incrementa angulo 1 grado
{ servo1.write(angulo);
delay(25);
}
for(angulo = 180; angulo >=0; angulo -=1 ) //decrementa angulo 1 grado
{ servo1.write( angulo );
delay(25);
}
}
Veréis como el servo se va moviendo primero hacia adelante y luego retrocede para volver a empezar.
Vamos ahora a hacer que el valor del potenciómetro represente la posición del servo de manera que el servo se mueva siguiendo al potenciómetro. Para ello hay que entender que el valor que leamos en la puerta A0 está comprendido entre 0 y 1024, y que estos valores tienen que distribuirse entre 0 y 180º. Así que para calcular el Angulo correspondiente basta con hacer:
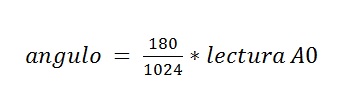 Como la experiencia me ha demostrado, que los errores haciendo este tipo proporciones tienden a infinito, voy a aprovechar para presentaros la función map(), que hace exactamente eso de un modo cómodo, librándonos de los float ( aunque para aprender no os vendría mal hacer así el programa y luego usar el map()).
Como la experiencia me ha demostrado, que los errores haciendo este tipo proporciones tienden a infinito, voy a aprovechar para presentaros la función map(), que hace exactamente eso de un modo cómodo, librándonos de los float ( aunque para aprender no os vendría mal hacer así el programa y luego usar el map()).
angulo = map( analogRead(A0), 0, 1024, 0, 180);
Traducido quiere decir: Haz la proporción de los valores que leas en A0, entre 0 y 1024, en un valor comprendido entre 0 y 180º y asignarle ese valor al ángulo.
#include <Servo.h> // Incluir la librería Servo
Servo servo1; // Crear un objeto tipo Servo llamado servo1
int angulo = 0 ;
void setup()
{ servo1.attach(9) ; // Conectar servo1 al pin 9
}
void loop()
{ angulo = map( analogRead(A0), 0, 1024, 0, 180);
servo1.write(angulo);
delay(250);
}
Aqui teneis un pequeño video, mostrando el movimiento del servo
Resumen de la sesión
En este curso arduino hemos aprendido lo siguiente: