Objetivos
Material requerido.
 |
Kit inicio UNO |
 |
Kit Inicio Mega |
Las Interrupciones
Nunca he sabido muy bien que tiene esto de las interrupciones, que hacer temblar a programadores curtidos como si fueran unos novatos.
Recuerdo que en una época en que nos dedicábamos a los microprocesadores (cuando los dinosaurios dominaban la tierra) y comenzábamos a jugar con las interrupciones, había un porcentaje de técnicos, ingenieros electrónicos o informáticos, que aun comprendiendo la idea de las interrupciones, parecía que su cerebro no podía abarcarlas y sencillamente las ignoraban elegantemente.
Mentarle las interrupciones a muchos Arduineros ya fogueados, en muchos casos supone que recordarán inmediatamente la necesidad de salir urgentemente a hacer algo. Nunca he sabido porque pasa esto, pero vamos a intentar ponerlo remedio inmediatamente.
¿Qué es una interrupción hardware?
A un nivel básico, una interrupción es una señal que interrumpe la actividad normal de nuestro microprocesador y salta a atenderla. Hay tres eventos que pueden disparar una interrupción:
Cuando un evento dispara una interrupción, la ejecución normal del micro se suspende (ordenadamente para poder volver) y salta a ejecutar una función especial que llamamos Interrupt Service Handler o ISH (Servicio de gestión de interrupción).
Cuando el ISH finaliza, el procesador vuelve tranquilamente al punto donde lo dejó y sigue con lo que estaba como si no hubiese pasado nada.
Pero ¿Qué hay tan urgente que no pueda esperar? ¿Es que nuestros Duinos no son lo suficientemente rápidos para ver cada poco si hay una señal de alarma? ¿Por qué complicarnos la vida con una cosa tan extravagante?
La respuesta como siempre es… depende. Nuestro Arduino puede estar liado y solo leerá la señal de un pin de tanto en tanto. Y si la señal que aparece se desvanece antes de que hayamos ido a ver, ni siquiera lo sabremos, porque aunque los Duinos son rápidos una señal electrónica lo es varios millones de veces más. Este es otro motivo por el que usar delays tiene mucho peligro.
Por otro lado las interrupciones nos ofrecen una ventaja enorme a la hora de organizar nuestro programa. Se define la función que se ejecutará al recibir una interrupción dada y se ejecuta limpiamente cuando ocurre, no hay que comprobar si se da o no una situación.
Simplemente te olvidas y se ejecutará única y exclusivamente cuando se alce la interrupción. No me digáis que no es elegante (SI, es una obsesión).
En realidad, nosotros funcionamos por interrupciones habitualmente, en respuesta a sucesos no previstos que nos sacan de la rutina habitual.
Imagínate que estás viendo tu serie favorita en la tele y estas esperando a tu colega, amigo o novia.
Hay dos maneras de abrirle la puerta. Una es pasar a ver si ha llegada cada, digamos dos minutos, para ver si esta con cara de pánfilo/pánfila en la puerta esperando a que le abramos.
La otra es establecer una interrupción, para eso están los timbres. Cuando tu compi llega, pulsa el timbre. Tu paras tu capitulo tranquilamente, dejas el refresco en la mesa y vas a abrirle.
Cuando vuelves con él, reanudas tu peli y recoges el refresco. ¿Qué tienen de raro las interrupciones? ¿Qué me decís del teléfono o de los Whatsapp? Es la misma idea. Y lo mismo pasa con tu Arduino.
¿Por qué voy a renunciar a las interrupciones y dedicarme a pasar por la puerta cada poco? Es absurdo. Las interrupciones no tienen nada de extraño ni de incognoscible. Dedícale un poco de tiempo y te encontrarás una herramienta magnifica que te resolverá limpiamente más de un problema.
Tipos de interrupciones
De los tres sucesos que pueden disparar una interrupción
Nos encontramos con que Arduino no soporta las interrupciones por software y punto.
¿Y entonces porque hemos hablado de ellas? Pues, porque otros entornos de programación las aceptan y no será raro que en el futuro Arduino también.
Los eventos programados o Timers, son muy interesantes y tendrán una sesión monográfica propia en un futuro próximo. Pero por ahora vamos a meternos con las interrupciones disparadas por hardware.
Las interrupciones por hardware
Estas interrupciones hardware, se diseñaron por la necesidad de reaccionar a suficiente velocidad en tiempos inimaginablemente cortos a los que la electrónica trabaja habitualmente y a los que ni siquiera el software era capaz de reaccionar.
La idea que debéis que tener en mente es que vamos a definir una función que se ejecutará de forma asíncrona, sin planificación, cuando se ocurra un cierto suceso electrónico.
Para definir una interrupción necesitamos tres cosas:
Lo primero es un pin de Arduino donde conectaremos el “timbre” de llamada. Dependiendo del modelo Arduino que tengamos, tendremos varias posibilidades:
| Modelo Arduino | Int 0 | Int 1 | Int 2 | Int 3 | Int 4 | Int 5 |
|---|---|---|---|---|---|---|
| UNO | Pin 2 | Pin 3 | ||||
| MEGA | 2 | 3 | 21 | 20 | 19 | 18 |
| DUE | Todos los pines del DUE pueden usarse para interrupciones. | |||||
| Leonardo | 3 | 2 | 0 | 1 | 7 | |
Esto quiere decir que el Arduino UNO puede definir dos interrupciones hardware llamadas 0 y 1, conectadas a los pines 2 y 3 (Para que no sea fácil).
El Mega como es habitual en él, acepta nada menos que 6 interrupciones diferentes. Y el DUE, muy sobrado, exhibe su poderío.
En cuanto a la condición de disparo puede ser:
Si nuestra call back function se llama Funcion1 (), para activar la interrupción usaremos:
attachInterrupt(interrupt, ISR, mode)
Donde Interrupt es el número de la interrupción, ISR será Funcion1 y mode es una de las condiciones que hemos visto arriba. Así en un Arduino UNO podría ser:
attachInterrupt(0, Funcion1, RISING) ;
Suponiendo que hemos enchufado la señal de interrupción al pin 2 de Arduino. Vamos a ver algún ejemplo de interrupciones.
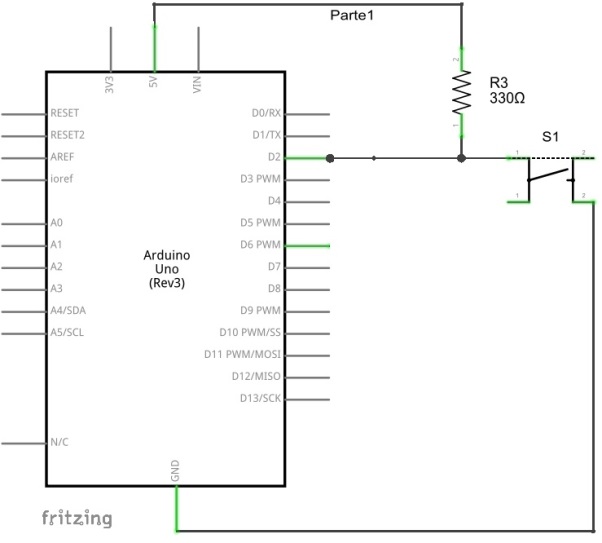
Esquema de conexiones
Es una especie de costumbre en Arduino, usar un pulsador para ilustrar el concepto de Interrupción, así que nos plegáramos a ello. Vamos a utilizar un típico circuito para leer un pulsador con un pullup.
Hasta ahora habríamos escrito el programa para leerlo así,
void setup()
{ pinMode(2, INPUT);
Serial.begin(9600);
}
void loop()
{ bool p = digitalRead(2);
Serial.println(p);
}
El resultado seria normalmente 1, por el pull up y la lectura bajaría a 0, al pulsar el botón. Nada nuevo en esto.
Pero vamos a reescribir el programa para establecer una interrupción en el pin 2 (Interrupción 0) .El programa quedara más o menos así:
int contador = 0;
int n = contador ;
void setup()
{ Serial.begin(9600);
attachInterrupt( 0, ServicioBoton, FALLING);
}
void loop()
{ if (n != contador)
{ Serial.println(contador);
n = contador ;
}
}
void ServicioBoton()
{ contador++ ;
}
En primer lugar fijaros que hemos eliminado la definición de entrada del pin 2, porque no vamos a usarlo como input estrictamente. Con definir la interrupción es suficiente.
En segundo lugar usamos attachInterrupt() pasándole como parámetros la interrupción 0, que es el pin2 de Arduino UNO. SI fuese la Interrupción 1, la conectaríamos al pin 3 (Anda que…)
Le pasamos el nombre de la función CallBack ServicioBoton, que es de lo más sencilla. Un variable global contador, guarda el número de pulsaciones. Lo único que hace la función de servicio es aumentar contador en uno cada vez que se pulsa y volver.
Y por último el trigger es FALLING porque el estado es normalmente HIGH y baja a LOW al pulsar el botón, utilizaremos el disparo con el flanco de bajada, o sea FALLING o LOW.
El loop comprueba si el número de pulsaciones ha cambiado y si es así lo imprime, pero puede dedicarse a hacer cualquier cosa, porque no vamos a perder ninguna pulsación.
Os puede parecer una manera extravagante de hacer las cosas pero no me digáis que no es elegante. De hecho todos los lenguajes modernos de alto nivel para Windows, Mac o Linux utilizan la programación por eventos que es algo básicamente igual a esto (Salvando las distancias claro).
Cuando veamos la salida en la consola tendremos una sorpresa esperada:
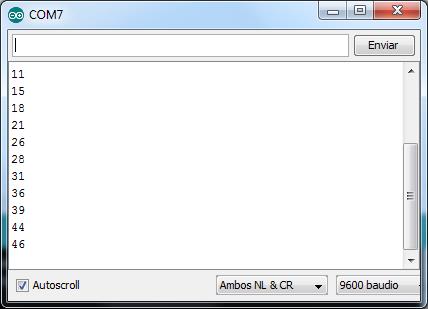
Cuando pulsamos el botón, el número que aparece no aumenta de uno en uno si no a golpes. ¿Por qué?
Pues como ya vimos en su día, se debe a los rebotes del pulsador. Decíamos en la sesión “Condicionales y botones”, que para eliminar el rebote de los botones, tenemos que hacer el debouncing y allí lo hacíamos con un delay de 250 ms.
Pero vamos a tener un problema. No podemos usar un delay dentro de una interrupción. No funciona. ¿Cómo dice?
Hay varias consideraciones a tener en cuenta con las interrupciones:
Además cuando definimos una variable global como contador, de la que depende una función ISR, se recomienda definirla como volatile y no como una global normal.
Si necesitas un retraso para algo, o sea , un delay, siempre es mejor, comprobar el tiempo transcurrido y decidir si se toma la acción o no. Veamos otro ejemplo
volatile int contador = 0; // Somos de lo mas obedientes
int n = contador ;
long T0 = 0 ; // Variable global para tiempo
void setup()
{ pinMode(2, INPUT);
Serial.begin(9600);
attachInterrupt( 0, ServicioBoton, LOW);
}
void loop()
{ if (n != contador)
{ Serial.println(contador);
n = contador ;
}
}
void ServicioBoton()
{
if ( millis() > T0 + 250)
{ contador++ ;
T0 = millis();
}
}
En primer lugar definimos contador como volátil, por prescripción médica, y definimos otra variable global T0 para almacenar el tiempo a partir del cual contaremos.
En la ISR la diferencia es que comprobamos si el valor actúan de millis es mayor en 250 ms a la última vez que paso por la interrupción. Si no es así, lo consideramos un rebote y lo ignoramos olímpicamente. Por el contrario si ha pasado un tiempo prudencial incrementamos contador.
La ventaja d este sistema es que no congelamos el procesador con un delay, si no que le dejamos seguir con su trabajo, atendiendo otras interrupciones, por ejemplo.
Pero….Un momento… No habíamos dicho que millis() no funciona en las interrupciones.
Así es. Mientras una interrupción esta activa millis está congelada y su valor no cambiará, pero sigue pudiéndose leer.
Por ultimo os conviene saber que existen algunas otras instrucciones relativas a las interrupciones:
Resumen de la sesión
En este curso de arduino hemos aprendido lo siguiente: