Objetivos
-
- Presentando un pequeño joystick.
- Leyendo el joystick.
- Moviendo el servo mediante el stick.
- Filtrando las lecturas.
Material requerido.
| Tienda España | Tienda Mexico | |
|---|---|---|
 |
Kit inicio UNO | Kit inicio UNO |
 |
Kit Inicio Mega | Kit Inicio Mega |
Que es un joystick
Un joystick suele estar formado por dos potenciómetros a 90º que transforman el movimiento en X e Y del mando en una señal eléctrica proporcional a su posición y que además suele incluir un botón.
Así pues, suelen tener 5 pines: X, Y, botón y 6V más GND.
En realidad ya usamos todos estos componentes previamente y la única curiosidad del joystick es que resulta un elemento muy cómodo para posicionar algo, aunque no sea demasiado preciso.
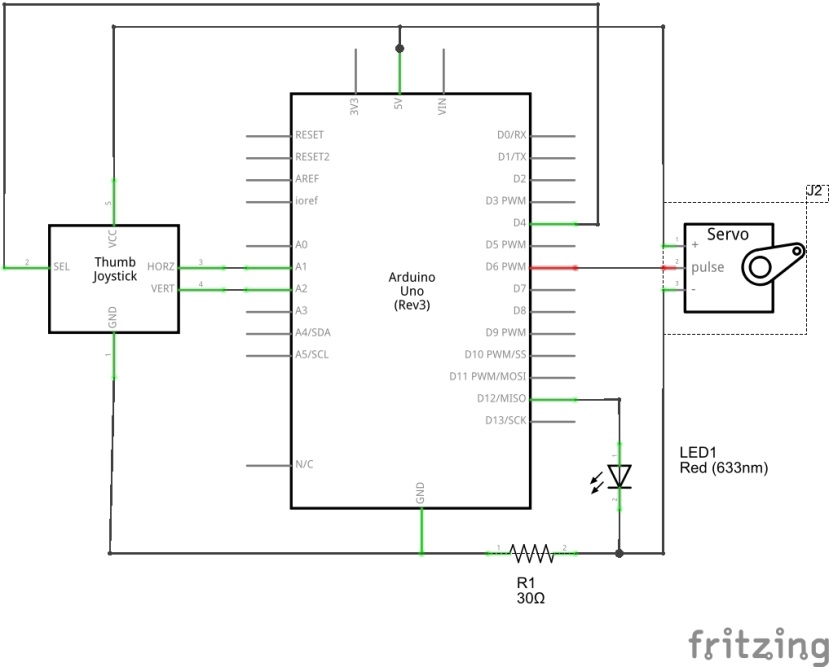
Vamos a montar un circuito con un servo como en la sesión previa y usaremos uno de los ejes del joystick para posicionar un servo, y si pulsamos el botón encendemos un LED. (Ignoraremos el otro eje Y, aunque podríamos usarlo para posicionar un segundo servo).
El pin correspondiente al botón suele venir marcado como SW de Switch.
Aquí tenemos el diagrama eléctrico:
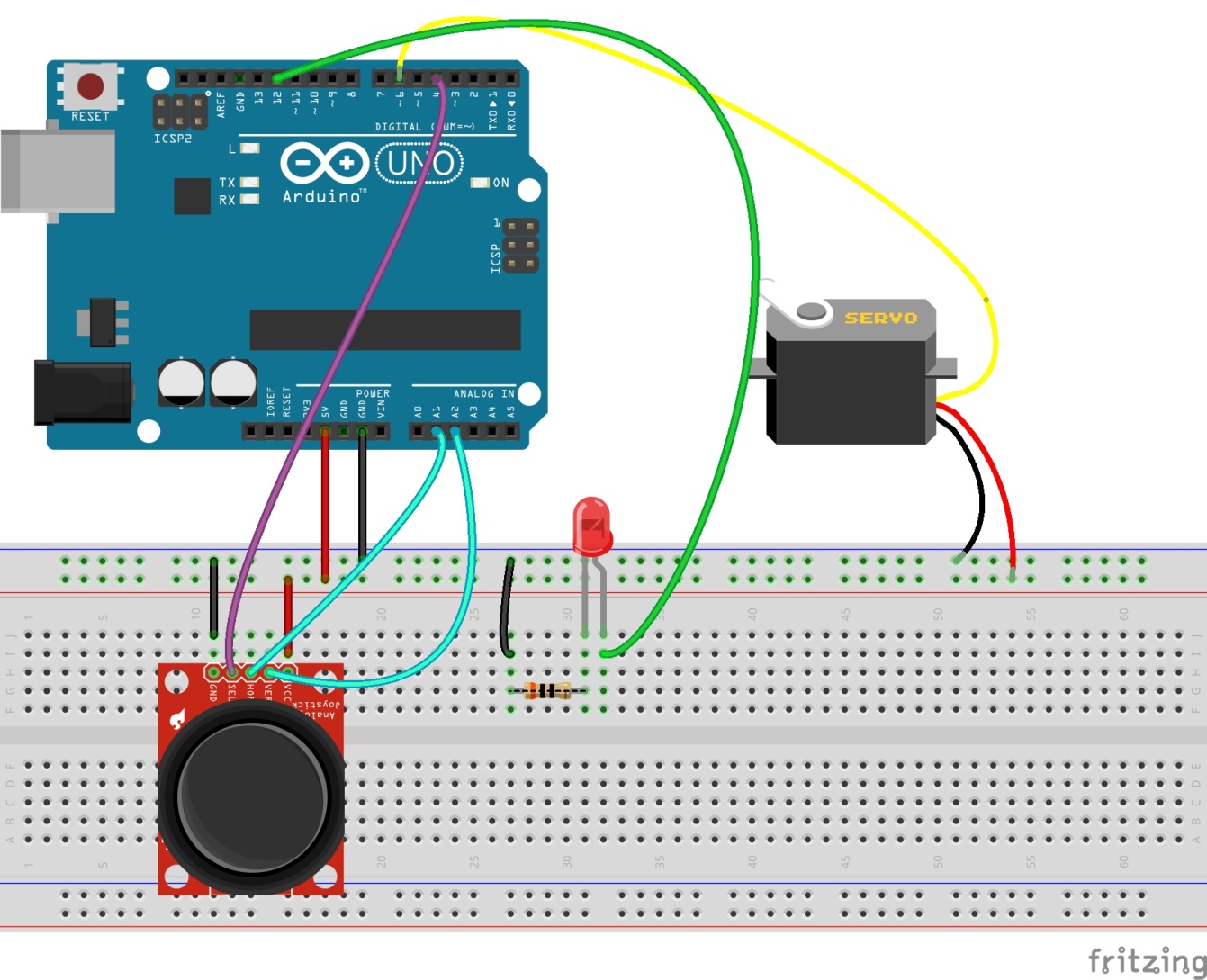
 Y para la protoboard:
Y para la protoboard:
El Programa de control
Vamos con el programa:
#include <Servo.h> // Incluir la librería Servo
Servo servo1; // Crear un objeto tipo Servo llamado servo1
int angulo = 0 ;
int Eje_X = A1 ;
int Eje_Y = A2 ;
int boton = 4 , LED = 12 ;
void setup()
{
servo1.attach(6) ; // Conectar servo1 al pin 6
pinMode( boton, INPUT_PULLUP) ;
}
void loop()
{
angulo = map( analogRead(A1), 0, 1024, 0, 180);
servo1.write(angulo);
if ( ! digitalRead(boton))
digitalWrite(LED, HIGH);
else
digitalWrite(LED, LOW);
delay(250) ;
}
- La parte que corresponde al servo es exactamente lo mismo que en la sesión 16. Por lo demás hemos incluido unas definiciones al principio indicando que hemos conectado el eje X a la entrada analógica A1 y el eje Y a la entrada A2.
- El pulsador está conectado al pin digital 4 y el LED al 12, de forma que si queremos cambiar de pines, por la razón que sea, bastara con actualizar esta lista al principio del programa.
Insistir en que hemos definido la entrada correspondiente al boto del joystick como INPUT_PULLUP y no como INPUT, porque de este modo no necesitamos incluir una resistencia, sino que Arduino conecta un pullup internamente
Por eso leeremos LOW al pulsarlo y entre tanto será HIGH, por ese motivo invertimos la condición en el if. Encenderemos el botón solo cuando pulsemos.
El servo sigue la posicion del joystick y cuando soltamos vuelve al centro.
Pero hay algo de epiléptico en el movimiento del servo (y más con uno barato como éste que estoy usando). Recibe muchas interferencias y el movimiento es muy convulso, porque, aún si el servo tuviera una cierta precisión (lo que es una suposición entre optimista y muy optimista) los potenciómetros y los convertidores analógicos a digital siempre tienen un margen de ruido.
Seguro que se nos puede ocurrir una forma de mejorar ese movimiento. Pensadlo, ¿Que podemos hacer para filtrar ese ruido?
No, en serio. Piénsalo primero antes de seguir.
Vale. En el mundo real, las cosas no son nunca blancas o negras, sino más bien en tonos grises (o muy frecuentemente chocolates), por eso no es buena idea enviar las lecturas directamente al control el servo, o de lo que sea que estamos moviendo.
Hay que filtrar un poco la señal. Sin entrar mucho en este tema (sobre el que hay enciclopedias),vamos a usar una técnica muy básica, pero muy eficaz en muchas ocasiones y que os conviene conocer.
Vamos a leer el potenciómetro para decidir si subimos o bajamos el valor del Angulo. No para calcular Angulo directamente.
Como el potenciómetro nos da valores entre 0 y 10000, cuando está centrado o suelto, leerá sobre 500, poco más o menos (aunque bailará). Así que le vamos a dar un margen de tolerancia. Solo aumentaremos el Angulo, un valor dado, si la lectura del potenciómetro sobrepasa el valor de 600 y lo disminuiremos cuando baje de 400.
De este modo pequeñas oscilaciones alrededor del punto medio, no nos afectarán. Es decir las hemos filtrado. Esto reflejado en el programa, podría ser algo así:
#include <Servo.h> // Incluir la librería Servo
Servo servo1; // Crear un objeto tipo Servo llamado servo1
int angulo = 90 ; // Empezamos en el centro
int salto = 3 ; // Controla el salto por movimiento
int Eje_X = A1 ;
int Eje_Y = A2 ;
void setup()
{
servo1.attach(6) ; // Conectar servo1 al pin 6
pinMode( boton, INPUT_PULLUP) ;
}
void loop()
{
int p = analogRead(A1);
if ( p < 400 ) // Si la lectura es menor de 400
angulo = angulo - salto ; // disminuimos el angulo
else if (p>600) // Si mayor de 600
angulo = angulo + salto ; // Aumentamos el angulo
servo1.write(angulo); // Y este es el que mueve el servo
delay (50); // Este delay regula la velocidad del movimiento
}
Creo que comprobareis que el movimiento es más fluido y uniforme, y que prácticamente elimina las convulsiones del servo. Además usamos este método para dejar clavado al servo en la posición que nos interesa (Aunque soltemos el mando), algo que del otro modo sería imposible.
Resumen de la sesión
Con este arduino curso de prometec hemos aprendido lo siguiente:
-
- Hemos visto que un joystick son dos potenciómetros a 90º mas un pulsador, ambos normales y corrientes.
- Aprovechamos el montaje anterior para mover el servo con el joystick y mapear su valor entre 0 y 180º
- Hemos introducido el concepto de filtrado de señales, que de por si es una rama específica de la electrónica y la computación, y una, que cada día es mas importante en todos los ámbitos de la tecnología.