Robot sigue líneas con mBlock
Pues ya va siendo hora de ir terminando, al menos de momento, con el robot rastreador o sigue líneas. En esta última sesión programaremos de forma definitiva el robot para que sean los sensores de infrarrojos los que guíen su movimiento de acuerdo al circuito que hallamos dibujado.
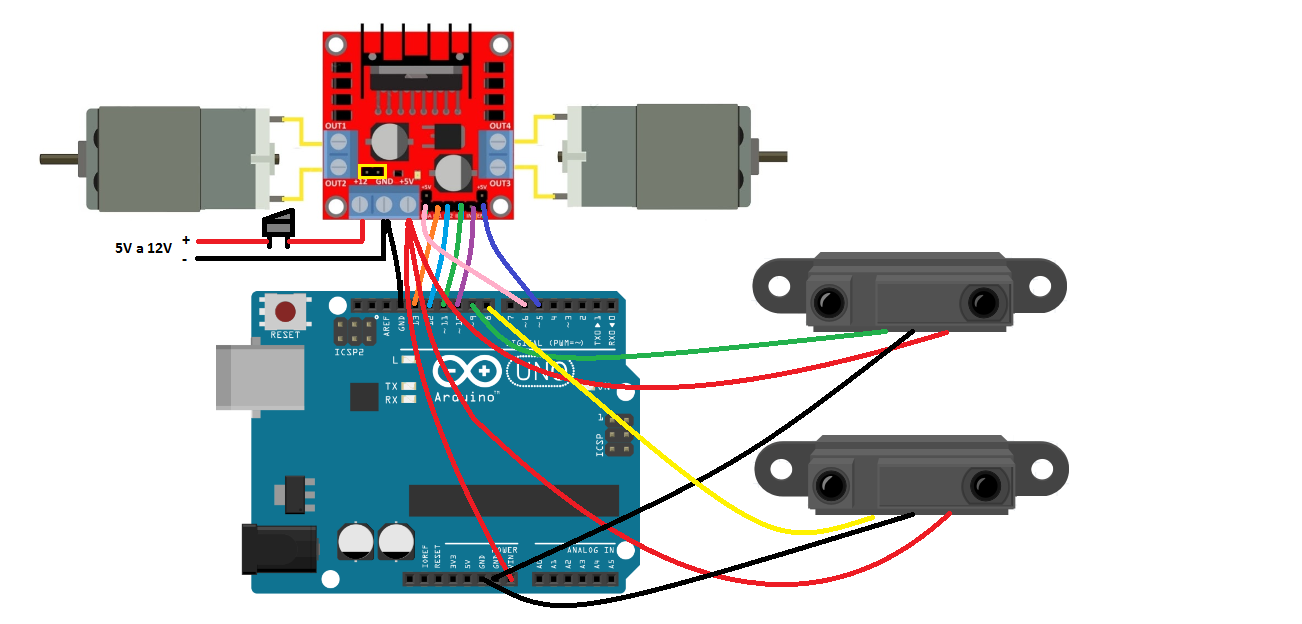
Ya hemos hablado del concepto que utilizaremos para diseñar el algoritmo que hará las veces de inteligencia en nuestro robot, pero en esta sesión lo repasaremos de nuevo. Además aprenderemos a integrar y conectar los infrarrojos en el montaje que ya tenemos.
Aquí tenéis el enlace a la nueva sesión:
Seguro que se puede mejorar mucho tanto el diseño del coche como la programación para hacer el robot lo más eficiente y rápido posible a la hora de seguir el circuito. A eso os animamos y esperamos que lo compartáis con nosotros.
Por lo demás, vamos a cambiar de tercio en lo que a mBlock se refiere, y tenemos en mente subir algunas sesiones utilizando los componentes del kit de inicio que no hemos podido usar en el curso de S4A debido a sus limitaciones, pero que creemos que podremos solventar utilizando mBlock.
Además desde Prometec hemos creado algunos bloques nuevos para posibilitar y facilitar en la medida de lo posible la utilización de esos componentes de los que hablamos. Y por si os animáis, os explicaremos cómo podemos crear nuestros propios bloques.
Así que permaneced atentos, que todavía queda mucho por hacer. Un saludo desde Prometec y hasta la próxima.
